 RSS Feed
RSS Feed June 30th, 2017
June 30th, 2017  Awake Goy
Awake Goy Biomimetic Millisystems Lab/UC BerkeleySalto-1P uses a small motor and a system of linkages and gears to jump. Because it spends so little time in contact with the ground, the robot needs to do most of its control in the air. To do that, it uses a rotating inertial tail and two little […]
Jew World Order
The Anti-Christ – Satan's Chosen People
60 sec SEARCH
-
For Mobile Users.
Best viewed in Desktop Mode Hebrew is Greek
Jewish History
Jews an invention
Hanukkah origins
Jews Expelled
Auschwitz Resort

Holocaust hoax
Titanic sunk
Jesus of Galilee
Judaism = Islam

Mafia are Jews
Jewish NAZIS
Azaria Chamberlain

Sandy Hook Hoax

Boston Marathon

Port Arthur

Bali bombing

New Zealand

George Floyd

Julian Assange

Climate Change
-
Recent Posts
- Philadelphia Experiment
- Nixon Tapes
- Found 200 abused children and a cemetery full of ritually sacrificed children in Guatemala
- Avoid Red Light and Speed Camera Tickets with Photo Blocker Spray
- Getting women into the workforce was a good way for the Jews to trick the goyim that it was “progress”
- Law institute of Victorian pedophiles
- Library Apologizes For Hosting Rainbow Dildo Butt Monkey to Entertain Children
- OBE Master Given UNFILTERED ACCESS to HUMANITY’S FUTURE on the OTHER SIDE! | Darius J. Wright
- Darius J Wright Interview – Soul Trap, Shape of Earth, Reincarnation, OBE, Dreams, Purpose of Life
- This 1933 Jewish event was called “The Romance of a People.”
- Christmas SANTA = SATAN
- GREEK-SPHINX- DELPHI MUSEUM GREECE
- Greece has been voted ‘Best Cuisine in the World’ for 2024/2025
- The World Will Soon Know The Truth! Darius J Wright Interview
- What Turkish Cuisine?
- SPACE IS SO FAKE
- Antisemitism
- The 911 Rockefeller ritual in 1967
- Bali Bombing Attack
- The opiod epidemic was directly caused by the jewish Sackler family.
- Israeli’s destroying Christian cemeteries again
- What is called Italy was Great Greece
- Wollongong Mayor Tony Bevan ran child sex ring
- Jewish Artwork
- JewBelong.org
- Church of Satan got owned by Jake Shields
- Deport All Jews
- Stop vaccinating your children.
- Gender Equality Ambassador
- Map of Ptolemaic Egypt
- Daniel Andrews the Pedophile
- Sophia Stewart the ‘Mother of the Matrix’ drops the truth bomb: Facebook is a CIA database
- This is Randy Weaver of Ruby Ridge
- theatre of Sparta in Greece
- Canadian army showing off their epic skills again
- Lord protect us from the jews
- Graphene Oxide in Anesthetic
- OPRAH SAYS “IT FEELS GOOD TO BE MOLESTED AS A CHILD & IF DONE RIGHT THE CHILD SHOULDN’T REMEMBER”
- Jewish Sabbatean Frankist Satanic Ritual Abuse Survivor Vicki Polin – Child Sacrifice
- Dr. Mehmet Oz with satanic jewess, spirit cooker Marina Abramovic
- A pro-vaccine doctor, who used social media to shame people who were not Jabbed with COVID mRNA shots, has died suddenly
- Child sex abuse survivor Glen Fisher starts naming names like Bob Hawke etc
- End Anti-Semitism
- Michael Charles Dyson did Port Arthur Massacre
- The Holodomor was a GENOCIDE committed by Jewish Bolsheviks
Categories
- "Chemtrails" — How They Affect You and What You Can Do
- "Royal Family": They are ALL Jews!
- "Trump Supporter Riot" Was STAGED by the D.C. Police!
- $1m grant for Malaga RSPCA
- $7.5m grant for Yagoona RSPCA
- 'Gender-bending' chemicals found to 'feminise' boys
- 'USA Hiding Real Debt Worse Than Greece' Economic Collapse is HERE
- 000 To Give You just The Flu? … sure
- 10 Chemical Weapons Attacks Washington Jews Don't Want You to Talk About
- 10 Jewish false flags operations that shaped our world
- 10 Taxpayer Handouts to the Jewish Super Rich
- 100 hidden GMO ingredients
- 100 Indonesian boys in Australian prisons
- 100 of the World's top minds killed by the Jews
- 100 YEARS OF JEWISH PLOTS AGAINST THE USA
- 100 years of Jewish War lies
- 100000 Gather for Talmud Study Celebration at MetLife Stadium
- 1000000 or more Jewish Satanist in USA
- 12 Tribes of israel
- 14000 U.S. Deaths Tied to Fukushima Reactor Disaster Fallout
- 15 million german killed by the Jews
- 15 yr-old Jew submits a ‘Holocaust denial’ report called Holohoax & gets an ‘A’
- 1933 chicago jewish cultural festival. Mock sacrifice to moloch.
- 1975 THE UNITED NATIONS PASSED A RESOLUTION DECLARING ZIONISM A FORM OF RACISM.. it was revoked by 1991
- 1996 port arthur massacre
- 2 AMERICAN CIA AGENTS CAUGHT IN SYRIA
- 200 million baby male chicks killed every year
- 2012 – NEWEST 9/11 DOCUMENTARY – PROOF 9/11 WAS AN INSIDE JOB
- 2012 ANNOUNCEMENT by Princess Kaoru Nakamaru Japan
- 250.000 people across Brazil have been forcefully removed from their homes for the World Cup.
- 2700 ARMORED VEHICLES PURCHASED FOR POLICE DEPARTMENTS BY DHS
- 3-D Holograms of “Holocaust Survivors” Now A Reality
- 4 British Mi6 Jihadists DEAD
- 4000 Israeli Employees in WTC Absent the Day of the 911 Attack
- 440hz Music – Conspiracy To Detune Us From Natural 432Hz Harmonics
- 46 Ways to Protect Yourself from Nuclear Radiation
- 5 Israeli agents waiting for 911 to happen
- 5 Stars Who Stood Up to Zionism + 5 Who Bowed Down to Cancel Culture
- 50 Jewish owned USA Hospitals overcharge by 1000 percent
- 6 Jewish Companies That Profit from the Police State
- 6 million Jews myth
- 6 Million Jews need funds 1915 – 1938 before Hitler
- 6 Months Passed Poor Dog Only Knew How to Drink Rain Water to Try to Live Now He Is Like a Dry Leaf
- 60 Lab Studies Now Confirm Cancer Link to a Vaccine You Probably Had as a Child
- 6000 Wolves Remain With No Help From Congress!!!
- 6000 year old inscription with Greek letters
- 7.2 million-Year-Old Pre-Human Fossil Suggests Mankind Arose in Europe NOT Africa
- 700.000 years old Skull discovered in Greek cave
- 78 Yr Old Brit Beat 'Incurable' Cancer By Changing Diet
- 7News : Policeman stood down over arrest
- 85 million indians killed by the British Jews
- 9 year old discusses the meaning of life and the universe
- 9/11 WTC Biggest Gold Heist in History: $300 Billion in Bars
- 90 Pounds Of Cocaine Found On Cargo Ship Owned By Jewish Anti-Drug Senator’s Family
- 911 classroom ritual with Bush
- 911 explosions before the plane hit tower!
- 911 Jewish Preparation for the WTC destruction
- 911 Kids Coloring Book
- 911 last man standing
- 911 not over yet
- 911 questions answered truthfully
- 911 security van
- 911 the money maker
- 911 the Zionist money maker
- 911 truth
- 911 video faked by mainstream media news networks
- 911 zionist attack
- 99.9% of human rights organizations are owned by the Jews to cover up their crimes
- A 6000 Year History Of The Jew World Order
- A BBC Documentary on Vanunu Exposes Who Controls the Media in America
- A Bengali refuses to fill petrol for Jews in UAE
- A Current Affair Zionist Programming
- A DINGO ATE MY BABY!! Marina Abramovic vs Lindy Chamberlain
- A faithful dog stays by dead friend
- A female humpback whale had become entangled in a spider web of crab traps and lines
- A globalist Jewish rat's nest amidst the rise of Asia
- a Jew destroyed all ancient artifacts in Sparta
- A last minute guide to the Bible
- A Libyan Girl's Message to Obama & NATO on Their Aggression on Libya
- A List Of Child Sex Offenders Inside The British Government
- A pilot who wrote a conspiracy theory book about 9/11 assassinated
- A POLISH CHURCH IN CANADA SAYS NO!!!
- A pop up vaccine clinic in Canada that is offering kids free ice cream in exchange for a vaccine
- A real Hebrew is a Negro
- A ROTHSCHILD SPEAKS OUT
- A stray dog as thin as a bat in the trash pile an angelic woman who take it home and cared with love
- A true hebrew is a Negro. Jews are an invention.
- A Very Bad Day for Al-Qaeda FSA CIA Terrorists in Syria
- A World Revolution Has Begun!
- Aaron Russo Speaks Out Against Evil Jewish Plans To Enslave Mankind
- ABC News Propaganda
- Aboriginal artists who’s art is killing it on social media
- ABOUT THE UNIVERSAL INTELLIGENT LIVING ORGANISM
- Abraham Lincoln and Jefferson Davis were the same Actor
- Abraham Lincoln the filthy Jew
- Academy formerly Xe – Blackwater USA and Blackwater Worldwide killing civillians
- Acidic Blood vs Alkaline Blood
- Actor Steven Seagal: We have to take this country back from the NAZI Jews
- Actors used to fake Media News
- Adelaide: Rights Lawyer Attacked by Murdoch Media
- ADHD is a prime example of a fictitious disease
- Adidas track pants stitching failures
- ADL = Jewish Defense League and other Criminal Zionist Groups in Government
- ADL rape and kill children
- ADL rape kids
- ADL terrorist group Slams “Jews Control Hollywood” Sketch From Academy Awards Ceremony
- Admiral tyres – cheap and nasty
- Adolf Hitler — Agent of Zionism and Freemasonry
- Adolf Hitler and his Jewish Masters
- Adolf Hitler and the Jewish Holocaust Hoax Exposed
- Adolf Hitler and the Jews
- Adolf Hitler died of old age
- Adolf Hitler frees Louis de Rothschild from Gestapo
- Adolf Hitler had 4 daughters.
- Adolf Hitler Rothschild
- adolf hitler was a rothschild
- Adolf Hitler was defamed by jewish lies
- Adolf Hitler Was Financed by the Federal Reserve and the Bank of England
- Adolf Hitler's British Royal Family
- Adolf Hitler's daughter Angela Merkel has her fathers mustache
- Adolf Hitlers daughter Angela Merkel
- Adolf Hitlers USA Jewish business partners
- Adolf Hitler The Gay Bully of The Past
- Adolph Hitler related to Rothschild
- Adriana Victoria Munoz
- Aerpro audio connectors
- Aerpro ISO to Pioneer pathetic
- Afganistan Cuba Vietnam war to control drugs
- Afghan teenager killed by Australian Soldiers guarding Australian Bankers poppy fields
- Afghan war exposed
- Afghanistan War to protect Jewish opium farms
- AFP Corruption & Airport Drug Syndication
- African Holocaust by the Jews continues
- African Slavery in America: Jewish-Made
- After Years Of Secrecy A Psychic Begins Solving Crimes
- Again the Zionist Media using actors to create false News
- Agenda 21
- AIJAC – Australian Jews defaming good people again for the Jew World Order
- AIPAC backwards spells CAPIA
- AIPAC Jews want to stage more terror attacks to start more wars
- AIPAC scum
- AIPAC Zionists – the Archenemy of the American Nation
- Air Force dumped remains of 274 troops in landfill
- airplane
- Al Franken Admits Being Warned To Avoid Twin Towers on 9/11 by Jewish Former Mayor of New York
- Al Gore Admits “They” are Spraying 90 Million Tons Per Day of Toxic Chemicals into the Atmosphere
- Al Jazeera news network infiltrated by zionist jews
- Al Qaeda CIA Agent Commando ‘Getting a Haircut’ Before Yemen Killings
- Al Qaeda Never Existed
- Al Qaeda Zionist CIA agents
- Alan Salerian
- Alaska Government meeting prayer was HAIL SATAN.
- Albert Einstein a Historical Jewish Fraud
- Alex Collier Andromedan Contactee – Full 1994 Interview
- Alex Jones
- ALEX JONES & THEIR AGENDA
- Alex Jones – "I Support Israel Its Their Land" Zionism
- Alex Jones Exposed!
- Alex Jones Linked To Zionism
- Alex Jones On CIA Payroll?
- Alex Jones Shuts David Icke Up On Rothschilds
- Ali Abunimah
- Alien Base for Giants Discovered in the Bucegi Mountains
- Alien factory and UFO in the Zeeman Crater
- Alien false flag attack coming – smoking gun.
- alien invasion
- alien looking glass technology
- Alien Message: “Do You Wish That We Show Up?”
- Aliens and UFOs with Bob Hickman Psychic-Medium
- All Crypto Currency are run by the Banks
- All Jews are Zionists
- ALL PICTURES OF THE SUN STARS PLANETS IN SPACE ARE FABRICATED
- All prostitutes wear a Burqua
- All serial killers are jewish
- All Tattooists to be Finger Printed Palm Printed & Photographed for Government Database
- All Wars Are Jewish Bankers Wars
- Allah – Moon God
- Allah is Satan
- Alleged radar detection HQ busted
- ALLIED STARS FILMS
- Allison Speerin
- Allopathic Medicine
- Almine gives a lecture at Avebury light centre
- Amalek
- Amaysim – cheap and congested network
- Amazing Health Benefits of Juicing Raw Cannabis
- Amazing Herb Kills 98% Of Cancer Cells In Just 16 Hours
- Amber Heard the zionist Fraud
- Amcor group
- America & Britain Killing for Opium
- America funded Hitler
- America Killing for Opium
- America wake up
- America was sold to five billionaires
- America's farmlands to be carpet-bombed with Vietnam-era Agent Orange
- AMERICA'S PRETEXT TO INVADE AFRICA: US Marines Dispatched to Five African Countries
- America's Youth Army fights for the Jewish Bankers
- America-Israel-UK cannot even win a war against third world countries
- America’s media is almost exclusively kosher
- American academic group boycotts Israeli universities
- American Cancer Society scams
- American Children Eating Rats to Live
- American Dollar
- American Drug War fraud
- American Flag
- American Jews invent enemies for their World Order
- AMERICAN JEWS With AR-15’s AND AK-47’s Surround Texas Mosque
- American military have made prison rape legal by calling it "Medicalized Rape."
- American Militia Commander Tells Congress They Are Running Out Of Time
- American NAZI Jews
- American news
- American News
- American Opium farms in Afganistan
- American State Nationals
- American Zionist Council known as the "Kenen Committee" called the American Israel Public Affairs Committee (or AIPAC)
- Americans are waking up to the Anti-Christ
- Americans Made a Pact With the Devil After 9/11/01
- Americas
- Amirah Droudis ASIO agent
- Amish community puppy mills – the dark side of religion.
- Amnesty International a zionist jewish front
- Amnesty International another charity scam
- Amnesty International: Another False Beacon charity sham
- Ampol's pedophile network
- An anti-semite is not someone who hates Jews; it is someone the Zionists hate.
- An Astronaut Losing His Head in the CGI on Board the Fake ISS
- An interview with an ex-Navy Seal
- Analysis Finds Monsanto’s GM Corn Nutritionally Dead Highly Toxic
- Anastasia Droudis ASIO agent
- ANC IS A COMMUNIST JEWISH FRONT
- Ancient Afghan treasures tour Australia
- Ancient Aliens
- Ancient Greek dialects in Italy
- Ancient Greek Pelike (4th Century BC) depicting a woman acrobat shooting an arrow with her feet
- Ancient Greek Pyramid predates Egypt.
- Ancient Greeks Discovered America Thousands of Years Ago
- Ancient Jewish History: Banking & Bankers
- Ancient Satanic Torah found in Turkey
- Ancient synagogue in Syria destroyed by the CIA syrian rebels
- And Desecrate Churches!
- and Micro Chips in The Swine Flu Vaccine
- And Restrain Children Without Parental Consent
- And Two Children
- Andrew Breitbart assassinated by the CIA
- Angela Merkel is Hitlers Daughter and a Rothschild
- Angela Merkel: Hitler’s Daughter- The Secret Stasi Files And Artificial Insemination
- Angelina Jolie the zionist
- Angelus
- Angora Rabbits SCREAM for life as their fur is RIPPED from their skin
- Anhar Kochneva
- Anhar Kotschnewa
- Animal Assistance League needs donations
- Animal cruelty
- Animal Cruelty Free Shop
- Animal rescue group SoCares takes on CESSNOCK City council
- Animal testing on cats & dogs is legal for Jewish Corporations
- Animal Testing on GM Foods not safe
- Animal Welfare in "Nazi Germany
- ANIMALS STILL SKINNED AND BOILED ALIVE IN CHINA AND STH KOREA
- ankara
- Ann Althouse
- Ann Bressington Member of the Legislative Council of South Australia warns Australians about Agenda 21
- Ann Wright
- Anne Frank Diary Fraud Finally Admitted
- Anne Heche Video
- Anonymous
- Anonymous = CIA
- Anonymous forces a CEO to fire a woman whistleblower
- Anonymous is CIA
- Anonymous Leaks Jewish Satanic Cult Member Names
- Anonymous Message to AIPAC (ANTI-ZIONIST)
- another false Article by the Jewish Zionist Media "The Age"
- Another Jewish Pedophile ring – sex rings for the jewish elite
- Another Jewish Pedophilia ring
- another jewish psyops. Jews cry wolf again.
- another of China's animal cruelty
- Another Whistleblower killed by the Jew World Order
- Anthology – The Grant Hunt/ Rothschild’s Company that has its corporate eyes on one of Australia’s most Iconic locations Jenolan Caves
- Anthony Randazzo
- Anti American protests exposed
- Anti Christian Dianne Feinstein
- Anti Defamation League – anti Semitic hoax
- Anti Defemation League – the wolf in sheeps clothing
- Anti Gravity free energy
- Anti Jew birds
- anti semite Israel Jews good at fighting against unarmed semite arab women and children
- Anti-Defamation League Award Dinner for President John F. Kennedy
- Anti-homeless studs
- Anti-Semites
- ANTIFA is JEWISH
- Antisemitism
- Anunnaki and Ancient Hidden Technology (MUST SEE)
- anzac day
- ANZAC Day (Zionist Jews memorial day)
- ANZAC Day – the truth
- Anzac sacrifice commemorated at dawn services
- ANZAC Zionist Day
- Apollo fake moon landing proof
- Apple Airpod detecting brain activity
- Apple Jews reject App That Tracks U.S. Drone Strikes
- Appliances Online Australia pathetic
- Arabs Are ‘Just Like Hitler’
- Aramaic has Greek origins
- Araucanians (Mapuche): Homeric Spartans who colonised Chile
- Archeologists find evidence that Egyptians ruled Israel BC
- Arctic has gained hundreds of miles of thick ice in the last 3 years
- Are Catholic elites practicing Black Mass Child Sacrifice?
- Are Councils legal
- Are New York Hospitals Hiding Herpes From Metzitzah B’Peh Circumcision Rite
- Are Your Children Playing With Lucifer's Testicles? | The Truth About Easter Eggs
- Area 51
- argument
- Arlec Australia china made crap
- Arlec Australia electrical timers
- Armed Citizen Militia Shows Up At Occupy Phoenix
- arms deal
- Army dumps hundreds of heroic war dogs
- Army scientists secretly sprayed St Louis with 'radioactive' particles for YEARS to test chemical warfare technology
- Arrested? do not submit to their verbal contract!
- Artemis Sorras Hellas FM 07-10-2012/PART 1
- Asher Moses
- Asher Moses continues to steal articles for Fairfax Media
- Asher Moses defames the competition in his fasle articles
- Asher Moses from Fairfax Media defames the competition in his fasle articles
- Asher Moses israel Zionist Jew
- Asher Moses sacked from Fairfax Media
- Asher Moses sacked from Fairfax Media and ACCAN
- Asher Moses the Fairfax criminal
- Asher Moses zionist criminal of Fairfax News
- Asher Moses zionist tabloid journalist for SMH
- Ashkenazi Jews descended from ancient Turkey: New research
- Ashkenazi Khazars Are Not The Jews of The Bible!
- AshkeNAZIS
- Asics gel 1110
- ASIO
- ASIO killing the innocent for the Zionist Bankers
- Ask University of Wisconsin to End Cruel Experiments on Cats!
- assad
- Assange and the illuminati jews
- assassination
- Assassinations By Induced Heart Attack And Cancer
- attack
- attack helicopters
- attack on iran
- attempted murder
- Attorney-General Greg Smith the paedophile
- Audit The RSPCA petition
- AusAID charity scams
- Auschwitz – the holocaust gas chamber lie
- Auschwitz camp lies
- AUSPOST New Berrima NSW
- AUSPOST owned by Jews
- Aussie Brendon O’Connell’s Ordeal with zionists
- Aussie Jews lash out at PM Abbott for saying ISIS jihadists Jews 'worse than Nazis'
- Aussie Trade Unionist Exposes 9/11 Cover-up
- Australia day
- Australia day or israeli day
- Australia demands Israel probe abuse of imported cattle
- Australia dumps Israeli crime-fighting system tested on Palestinians
- Australia government ties to israel organised crime
- Australia in crisis
- Australia in trouble
- Australia is a Corporation of pretend laws
- Australia is a private owned corporation
- Australia Post pathetic
- Australia Post Track my item express post
- Australia Post you suck!
- Australia run and owned by criminal Jews
- Australia Terrorist Hostage Situation at Martin Place HOAX
- Australia to ovethrow Gaddafi
- Australia under attack
- Australia will ban growing your own food
- australia's corporate welfare
- Australia's Port Arthur Massacre Government and Media Lies Exposed
- Australia's richest person Gina Reinhart receives $764 million welfare loan
- Australia: Julia Gillard Wayne Swan Bob Katter And The Masonic Handshake
- Australia’s biggest tax cheats
- Australia’s NBN Co. is the Trojan for Internet censorship
- Australian Aboriginals shackled by Jewish Settlers
- Australian bodyguard helped Gaddafi's son
- Australian carbon tax scam
- Australian Carbon Tax to fund UN's crimes
- Australian cattle in the Middle East tortured by Zionist Meat Industry
- Australian Cattle industry cruelty
- Australian Constitution is invalid
- Australian Corporate Political Government
- Australian Courtroom procedures
- Australian Courts and Justices – Validation Diagrams
- Australian crisis actors
- Australian energy company CEO stands down after slew of racist remarks on Facebook
- Australian False Flag attack Riot police at NSW parliament house
- Australian Federal Police
- Australian Federal Police busted using fraudulent warrants
- Australian Federal Police Planting Drugs & Bombs
- Australian Federal Police raid Channel 7 over Schapelle Corby's incriminating evidence against the AFP
- Australian Flag
- Australian Government
- Australian Government $15 Billion spending on junk F-35 fighter jets
- Australian Government and industries run by the Jewish Mafia
- Australian Government are Jews
- Australian Government bailouts
- Australian Government charged with Treason
- Australian Government Grants scam
- Australian Government is a hoax
- Australian Government is not the Commonwealth of Australia
- Australian Government Jews
- Australian Government money grab $740 million 'unclaimed' super accounts seized
- Australian Government on Israel's leash
- Australian Government Pedophiles
- Australian Government's Pedophiles
- Australian Gun Control
- Australian Gun Control – Jews controlling unarmed Australian citizens
- Australian Gun Control controlling unarmed citizens
- Australian Human Rights Commission the Zionists
- Australian Immigration Government corruption
- Australian Immigration Policies – boat people
- Australian Jewish Government and their Corporate welfare tax havens
- Australian Jewish Government posing as Catholics and Christians
- Australian Jewish Government spying on Indonesia
- Australian Jewish Mafia
- Australian Jewish Pedophile Appeals His Already Too Lenient Sentence of 8 Years for Sodomizing 9 Boys
- australian jewish pedophile network royal commission 90 year suppression order
- Australian Jewish Woman Faces 74 Charges of Sexual Abuse
- Australian Jewish Woman Faces 74 Charges of Sexual Abuse.
- Australian Jews
- Australian Jews continue their reign
- AUSTRALIAN JUDGES ARE FRAUDS LIARS CRIMINALS TRAITORS & FOOLS.
- Australian Labour leadership change theatre
- Australian Labour Party links to criminal Jew Frank Lowy and World Cup Scandal
- Australian Laws and Government a fraud
- Australian Live Export animal abuse
- Australian Magpie Playing with dog
- Australian man Brendon O'Connell sentenced to at least 3 years for arguing with a Zionist Jew
- Australian Man Jailed For Confronting Zionist Jewish Spies
- Australian man jailed for offending a Jew.
- Australian Meat industry animal cruelty
- Australian meat Industry lies
- Australian Meat the Truth – FULL DOCUMENTARY
- Australian Mining Industry Rorting investigated
- Australian News
- Australian NSW farms being sold overseas
- Australian Organised Crime
- Australian Paedophile Dallas Clarke
- AUSTRALIAN PEDOPHILE RING EXPOSED; AUSTRALIAN GOVERNMENT
- Australian PM head of Satanic Lodge?
- Australian PM Masonic handshake
- Australian Police Accused of Mass Software Piracy
- Australian Police are Corporations not public servants
- Australian Police are not the Law only Corporations
- Australian Police charged with on-duty rape
- Australian Police Force
- Australian Police Force arrest man for wearing T-Shirt
- Australian Police hiding in civilian trucks
- Australian Police Pedo ring
- Australian Police tied to major drug trafficking
- Australian Prime Minister
- Australian Radar Detectors – Bel Sti
- Australian SAS helping CIA Mi6 (Al Qaeda) rebels in Syria
- Australian SAS role in Iraq revealed
- Australian Secret Detention Camps
- Australian State MPs boost their $153.000 salary by up to $80.000
- Australian Stock Report scammers
- Australian Tax Office fraud
- Australian Tax payer funds going to USA shareholders
- Australian taxpayers funding another $350 million yearly anti islam campaigns for our Jewish Governments
- Australian Weather man made
- Australian World Cup scandal
- Australian Zionist Government
- Australian Zionist Media
- Australian Zionist Terrorists training to fight for israel
- Australian Zionists
- Australias pedophile network
- Australias Zionist Meat Industry must be stopped
- Author: David Allender – Terrorized by SWAT Team
- Auto reviews
- Automotive Industry bailouts
- Automotive news
- Avoid Red Light and Speed Camera Tickets with Blocker Spray
- Azaria Chamberlain
- ✡ Jewish Sabbatean Frankist Satanic Ritual Abuse Survivor Vicki Polin – Child Sacrifice
- "Zionism financed Nazism"
- EPA should be called CPA = Corporate Protection Authority
- “May all Arabs die!” Israel Jews on Facebook express joy at Jordan bus crash that killed Palestinian pilgrims
- ‘I Was Raped By The CIA Medics’ Says Black-Site Survivor
- Baby boomer
- Bacterial Pneumonia Caused Most Deaths in 1918 Spanish Flu Pandemic
- Bad Cops
- Bahrain
- Bail Out The Bankers? Iceland ARRESTED Them and economy grew
- Bailing out Banks is all about more Greed
- bailout
- Bailout scam
- Bali Bombing Attack
- Bali bombings exposed
- Baltimore Bridge Collapse psyop
- BAN CIGARETTE TESTS ON ANIMALS!
- Ban Legal Giraffe Hunting!
- Bank financial planner scams
- Bank scams
- Bankers drug wars
- banks
- BANKS & “GOVERNMENTS”FORECLOSED WORLDWIDE
- Banks and Governments for Operating Slavery and Private Money Systems
- banks are getting taken to common LAW court for fraud !
- Banks are Jewish Swindlers
- Banned Herpes Mohel Still Circumcising Babies
- Banned Movie – Unlawful Killing
- Banned video of Jews selling foreskins for face cream companies.
- barack obama
- Barack Obama a CIA creation
- Barack obama's real name Barry Soetoro
- Barack Obama’s gay cover up
- BarackObama
- Baron Rothschild indicted in France over fraud case
- Barrack Obama CIA asset – Gulf disaster was planned
- Basfoods Ltd relating to its product "Victoria Honey"
- Basketball players use EPO
- Batman Massacre To Pass UN Gun Ban?
- Batman Massacre: WHY and HOW and WHO
- Batman was real
- BATR
- Bayer – Advantage for dogs
- Bayer deliberately infected asians and latinos with HIV
- Bayer has just sued the European Commission to overturn a ban on the pesticides that are killing millions of bees
- BAYER Pharmaceuticals
- BBC Now Admits AL Qaeda Never Existed
- Beat Monsanto at their own game
- Beatles were Satanic Jews
- beatpsoriasis.com exposed!
- Bee Pollen is contaminated
- Before the Zionist Jews gave the slavic refugees Macedonia. True Macedonians were Greek.
- Benefits of Sodium Bicarbonate – Baking Soda
- BENGHAZI LIBYA. EMBASSY KILLINGS NEVER HAPPENED
- Benjamin Freedman's 1961 Speech about WW1
- Benjamin Netanyahu
- Benjamin Netanyahu the Lithuanian
- Berlin Jews then and Berlin Jews now
- Bermuda Triangle Mystery – Secret Revealed – Full Documentary
- bernake
- Berrima Communications
- Berrima Communications – Michael John Darby
- Best Australian Radar Detector 100% safe
- Best Evidence You Have Ever Seen That Puppet Masters Script Mainstream News Reports
- Best friends
- Best Gun Control speech
- Best Marijuana Documentary EVER!
- Beth Hart "My California" Live on Mark & Brian
- Beware of Canola Oil
- Beware of St Patricks Marist College dundas
- BiBi Netanyahu wont take a vaccine
- Bible was invented by the Roman Catholic Jews
- BIBLICAL ISRAELITES WERE BLACK
- Biblical Proof That The Jews Are NOT ‘God’s Chosen People’
- BIC razors are crap
- Biden the pedophile
- Biden upset that blue roofs didnt burn
- Bidvertiser Jews
- big bang theory Mayim Bialik the Jewess satanic whore
- Big Pharma thrilled as autism treatment market predicted to reach $11.42 billion by 2028
- Bill Clinton and CIA Gave Iranians Blueprint for Nuclear Bomb
- Bill Gates exposed for Chemtrail funding research
- Bill Gates Favors The Death Panel and Vaccines To Decrease The World’s Population
- BIOAEROSOL research
- Biological Warfare
- BIRD FEEDS CAT & DOG
- Birds Eye Corn Fritters GMO Corn products
- Birth & Marriage Certificates Scam : Corporations make bonds and trade on NYSE with them
- Bisphenol A (BPA) Contaminating Our Food
- Black Lives Matter Is Funded by These 18 Jewish Corporations
- Black Lives Matter sponsors
- Black Lives Matters
- Black Salve & Healing Clay
- Black workers 'banned from Gare du Nord during Israeli president visit'
- Blackmores Vitamin D3 makes me sick.
- BlackRock now owns Ancestry.com
- Blacks riot because its their moral obligation to
- Blackwater/Xe the Vatican puppets
- Bless Rabbi Moshe Aryeh Friedman for telling the truth
- Blind dog rescue Fiona – Hope For Paws animal rescue
- Blocked again for sharing the truth on Facebook (Jewbook)
- Blood of Aussies shed to give Jews freedom
- blood sucking Jews
- Bloom Box: The Alternative Energy that Terrifies Obama
- BLS
- Blue Circle Corruption
- bob hawke the pedo
- Bob Hawke the zionist Jew
- Bobby Orosco and Robert Chavez the anal invaders
- Bohemian Grove were the Jewish Elite fuck each other
- Bolschevick Jews Killed 100 Million White Christians
- bolsheviks
- Bolshevism is Judaism (Zionism)
- Bono and Bill Gates-backed Global Health Charity EXPOSED as a Fraud
- Bono Partners with Monsanto G8 to Biowreck Africa
- Bono the Jew
- Book about killing gentile children becomes bestseller in Israel
- Boral Cement & EPA corruption
- Boral Cement corruption
- Boral Cement grant of USD $3.3 million
- Borat – Throw the Jew Down the Well!!
- Boston bombing make-up kits
- Boston Marathon Bombing
- Boston Marathon Bombing false flag attack by Jewish Government
- Bought a cheap 2013 Toyota Kluger from Toyota Australia
- Bowral Police enjoying Alexandra Reserve with off duty friends
- boycott China made products
- BOYCOTT CHINA…END ITS ANIMAL TERROR!
- Boycott israel and Coca Cola
- Boycott Israel Campaign 2012
- Boycott Israel the Zionist Fake Criminal Jews
- Boycott Kellogg's to remove GMO's
- BOYCOTT SHAKIRA…THIS ZIONIST LOVER!!!
- BOYCOTT ZIONIST IKEA
- BP Gulf Oil spill flesh eating bacteria (Corexit) Deadly dispersant
- BP links to assassinations
- BP oil flesh eating bacteria
- BP pedophile network
- BPA-Free Does Not Mean Safe. Most Plastics Leach Hormone-Disrupting Chemicals.
- Brad Pitt's Genealogy
- Brain Cancer Medical Marijuana
- brainwashing
- Brainwashing jewish children to become killers
- BREAKING ALL THE RULES
- Brendon O'Connell
- Britain United Kingdom
- Britain's Jewish Government child stealing exposed by EU
- British and American Jewish War Crimes During World War II
- BRITISH CONSTITUTION GROUP CHAIRMAN ROGER HAYES ARRESTED
- British German Royal family
- British Jewish Royal Family Satanic Pedophile practices
- British Jews tested mustard gas on indians
- British lad knocking out a group of Israelis on a beach in Thailand
- British MI6 SIS disguised as Syrian rebels cutting heads of innocent Palestinian men
- British News
- British Queen's Paedophile ring
- British Royal Drug Running
- British Royal Family drug dealers
- British Royal Family fakes
- British Royal Family jewish ritual sacrifices
- British Royal Family Jews
- British Royal Family Jews exposed
- British Royal Family Opium Business
- British royals ‘used to be cannibals dining on human flesh’
- British royalty dined on human flesh
- British SAS MI6 busted
- British SIS MI6 rebels terrorizing Syria again
- British Zionist USA CORPORATE Wall street gangsters
- BRITISH ZIONISTS
- Buddha – Greek God Apollo
- Bull Fighting and the Jews
- Bureau of Labor Statistics
- Burka Hijab Jews
- Burradoo fire
- But we're Jewish
- Buzz Charlton
- BuzzFeed
- C Roberts Trucking
- C.I.A. Busted For Dealing Drugs To Americans
- cabal
- Caltex's pedophile network
- Camel animal cruelty in India
- Can Jews Be Saved
- Can the criminal Jews stop Putin?
- Can we really separate Judaism from Zionism?
- Canada CDC Suggests “Glory Holes” For Safe Sex During Coronavirus Pandemic
- Canada criminalizes criticism of Israel
- Canada signing away their sovereignty to the United States
- Canberra Zionist Jews rally to support criminal Israel
- Cancer Charities Are Scams Run By One Jewish Family – Government Says
- Cancer Charity scams
- Cancer Council scams
- Cancer cure
- Cancer cure Cancer free from using hemp oil
- Cancer cure fighting supplements
- Cancer cures banned by the FDA
- Cancer fighting supplements
- Cancer Foundation Australia scams
- Cancer Free 2 year old from hemp oil
- Cancer Healed Naturally/Holistically
- Cancer is big business
- Cancer is finally cured in Canada but Big Pharma has no interest
- Cancer Is Not A Disease! — It's A Survival Mechanism
- Cancer is Not Trying to Kill You It is Trying to Save You
- CANCER KILLER – Natural Cancer Cell Killer 10000 Times Stronger Than Chemo!
- Cancer research a scam
- Cancer Research charities 2nd biggest fraud of the century
- cancer research fraud
- Cancer research has always been a money grab for zionists
- Cancer treatments a joke
- Cancer treatments that work 100%
- Cancer truth – blood ph acidity levels causes cancer.. not genetics
- Cannabinoid Facts: THC CBD CBN CBC THC CBG and Other Unique Phyto Cannabinoids
- Cannabis facts
- Cannabis Oil Fights Cancer
- Cannabis The Endocannabinoid System
- Capitalism Is Jewish Usury
- Captured UK Journalist – ‘None Of The Rebels Were Syrian’
- Car connection
- Car Industry collapse
- Cardinal George Pell the Jew has confessed to creation of false documents and 'reprehensible' cover-ups of child sex abuse
- cartridges for kickbacks scandal
- Cases where Psychic's information finds body or makes arrest
- Casualties of War
- Cat purrs help prevent heart attacks
- catholic
- Catholic Bishops of Satan
- Catholic Church admits to Atleast 200 Pedophile Priests in Philippines
- Catholic Church and organised Crime
- Catholic Church Exposed
- CATHOLIC CHURCH PROCLAIMS- "RENOUNCE YOUR FAITH OR DIE!"
- Catholic Pope Francis charged trial set for trafficking orphans
- Catholic Priest speaks about NWO the Antichrist
- Catholicism ( the Roman Catholic Jews).. now called the Vatican
- Catholicism = Zionists = Jews = illuminati = Freemasons = Satanism
- Cats Blowtorched to Death at Live Cat Market in China
- Cayenne Pepper
- CC's GMO Corn Chips
- CDC admits Covid19 is fake
- CDC Caught Hiding Data Showing Mercury in Vaccines Linked to Autism
- CDC confirms aluminum in vaccines linked to childhood asthma and AUTISM
- CDC Quarantine Station map and Immigrant map must see to believe!
- Central Australia 1978
- Chabad Lubivitch – The Jewish Mafia that runs the world
- Change Australian Government Entitlements
- channeled messages
- Charles Manson provides insight into the Jewish mentality
- Charleston Church shooting another staged event by the jews
- Cheale Meats animal cruelty
- Cheap Laurastar Steam irons buy now
- Check out Rabbi Shmuley promoting his daughters kosher sex butt plugs
- chemical companies and Pharmaceutical firms to contaminate our AIR our WATER and our FOOD
- Chemistry Expert: Carbon Dioxide Can’t Cause Global Warming
- Chemotherapy does not work 97% of the time
- Chemotherapy is not the answer to cancer
- Chemotherapy kills
- CHEMOTHERAPY WILL KILL YOU FASTER
- Chemtrail Info Day London 15th Dec 2012
- Chemtrail Jets identified! Evergreen CIA Owned Airline Dropping Poison On You And Your Family
- CHEMTRAIL SCIENTIST MURDERED AFTER GOING ON NATIONAL RADIO
- chemtrails
- Chemtrails and Carbon Tax
- chemtrails and vaccines have in common?
- Chemtrails are real
- Chemtrails Australia
- Chemtrails destroying the ozone
- Chemtrails in Moss Vale NSW Australia
- Chemtrails in NSW
- Chemtrails Poisoning All Life! Scientific Proof!
- Chemtrails poisoning our earth to control our food supply
- Cherokees Spoke Greek and Came from East Mediterranean
- Chevra Hatzolah – Gods chosen Terrorists need the best medical care too.
- Chicken Industry
- child rape
- Child sex abuse survivor Glen Fisher starts naming names like Bob Hawke etc
- China & Korea boiling dogs alive
- China and Rothschild
- China Dog meat trade. We demand EU embargo on China!
- China Korea South East Asia: Stop cooking dogs alive
- China Motors
- China owned by the jews
- China's Beijing Zoo puts their animals on the menu
- China's dog meat animal cruelty
- China's Opium wars with the British Jews
- China's Unit 61398" Israel's Phantom Cyber Enemy
- Chinese activists recently stood up to dog meat traders and rescued 900 dogs bound for slaughter
- Chinese Girl Gets Run Over Horrific Footage
- Chinese Grown vegetables are coming in branded as a product of New Zealand.
- Chinese Jews purchase of Israel's Ahava shows boycott is hurting
- Chocolate trumps fluoride in the fight against tooth decay
- Christ
- Christian
- christianity
- Christmas is banned – it offends Muslims – jewish propaganda!
- Christmas SANTA = SATAN
- Christopher Columbus the Jew
- chrysler
- Church of Satan got owned
- Church of Satan got owned by Jake Shields
- CIA
- CIA & Western media's total fiasco in Syria
- CIA = ISIS = Al-Qaeda
- CIA Admitted to Staging Fake islamic terrorist Jihadist Videos in 2010
- CIA Agent Exposes about jews
- CIA Agents – ISIS and al-Qaeda – two sides of the same US-minted coin
- CIA and George Bush
- CIA Busted For Dealing Drugs To Americans
- CIA child trafficking operation behind 99% of child kidnapping and child sex trafficking.
- CIA created Al Qaeda
- CIA created Facebook for $500 million
- CIA creates dictators to do their bidding
- CIA drug trafficking
- CIA exposed
- CIA faked Gaddafi death .. just like Osama
- CIA Funding and Manipulation of the U.S. News Media
- CIA Heroin
- CIA Influence on the Mass Media: How Disinformation Campaigns Work
- CIA israel Created Wikileaks and Anonymous so you believe crap like this…
- CIA jet crashed with 4 tons of cocaine
- CIA Jews created Facebook not Mark Zuckerberg
- CIA Operated Aerial Spraying Plane Carrying "Mutated" Virus Shot Down in China
- CIA pretending to be islamic terrorists bomb Peshawar election rally.
- CIA pretending to be Taliban suicide bomber kills Peshawar election rally.
- CIA recruited Nazi war criminals
- CIA running away before Boston bomb blows
- CIA runs everything
- CIA Seal Team 6 involved in Boston Marathon Bombing
- CIA Secret Prison: Polish Leaders Break Silence About Black Site
- CIA Secret Wars Killed 6 Million People – Government Coverup
- CIA WhistleBlower Susan Lindauer EXPOSES 911 some truths some not so true
- Cigar UFO Floating Over Brazil
- Cinnamon and Honey
- City with no Jewish rulers proves Government is not needed
- City without Government ( Max Nebraska )
- Climate Change
- Climate Change Hoax
- Climate Change Scam to Promote Carbon Trading System
- clinton
- Clive Palmer is dumping toxic wastewater into the Great Barrier Reef.
- CNBC Exec’s Children Murdered 1 Day After CNBC Reports $43 Trillion Bankster Lawsuit
- CNN fake Libya war footage exposed
- CNN FAKE LYBIA WAR FOOTAGE-EXPOSED!
- CNN reporter removed after covering Israel’s Terrorism against Gaza
- CNN Reporter: I Received Orders to Manipulate News to Demonize Syria and Iran
- CNN Special Report 1985 Electromagnetic Frequency
- CNN wants this video banned
- CNN's Dana Loesch into Necrophilia
- CNN's Dana Loesch loves Golden Showers
- COBRA Update: The Secret Space Program
- Coca-Cola has been a supporter of Israel since 1966.
- Cocaine in Coka Cola
- CODEX ALIMENTARIUS
- Cody Roberts zionist animal cruelty in Wyoming
- Coles found guilty of passing off bread made overseas as 'freshly baked'
- Coles open to RSPCA meat
- Colloidal Silver for acne rosacea
- COMMERCIAL LAW AND THE UNIFORM COMMERCIAL CODE (UCC) INSTRUCTIONS 0.5
- Commercial Liens – The Most Potent Commercial Weapon
- Committee of 300
- Common Law Rights Group
- communism in America
- Communism is Judaism
- Communist Dictum- Accuse the enemy of those crimes you are guilty of
- Communist Dictum:- "Accuse the enemy of those crimes you are guilty of"
- Communist Governments growing behind the Democracy fraud.
- Communist Jews Rothschild Soros and Rockefeller Definately Want Your Firearms!
- Companies that test on animals
- Complaint against Facebook and Web Of Trust
- Comprehensive study: There are ZERO Amish kids suffering from cancer diabetes or autism
- Confessions Of A Former Jew
- Confessions of NWO Jewish Zionists
- Congressional Medal of Honor – Satanic Sigil
- CONTRAILS vs CHEMTRAILS
- Copenhagen zoo – Swiss bear cub shares Giraffe Marius' fearsome fate
- Corporate Globalist Governments destroying Australia
- Corporate Government Law
- Corporate Slaves wake up!
- Corporate Welfare in Australia
- Corporations
- Corrupt Court Psychiatrists Role in family courts by John Aster on Dr Chalk commiting Purjury
- Corrupt Mayor of Wingecarribee – Duncan Gair
- Corruption in Australia
- Corruption lies and ABC Zionist propaganda
- Councils Destroying Communities
- coup
- Court Report – Ipswich Queensland – James Bowes
- Court Room scams
- Courtesy Notice – Andrew Scipione – Alleged NSW Commissioner of Police.doc
- Courtesy Notice – Gregory Eugene Smith – Alleged NSW Attorney General.doc
- Courtesy Notice – Tracey Hall – Alleged Sheriff of NSW.doc
- COVID vaccines make humans part synthetic part organic
- Covid19 scam
- COVIDSafe – AU PRIVACY ACT 1988 – SECT 94H
- Cowardly Marines
- Craig Speerin
- crazy bikes
- crazy rosbif
- Creating more Jewish Terrorists on the world.
- Creativity and Non-Conformity Now listed as a Mental Illness by Psychiatrists
- credit
- Crimes Against Fathers Paedophile Group
- crimes against fathers paedophile group exposed
- Crimes and Trials
- crimesagainstfathers.com exposed!
- Criminal Australian Government Jews
- Criminal Jews try to ban Golden Dawn
- Criminal Jews try to ban Jewish run Golden Dawn
- criminally insane Peter Nolan's crimesagainstfathers.com exposed
- Crowd of Jews afraid of a rat
- Cryptogon
- CSIRO depopulation plan GMO food
- Cuban Missle Crisis False Flag attack
- Cupid.com Online Dating Scams!
- Cure Cataracts naturally
- Currawarna resident warns pet owners over thefts
- Cyber Attacks and Anti Hate Groups attacking the Truth
- Cyber Attacks on my website
- cycle
- Cyclists and swimmers using EPO
- Cyprus giant Hail Attack
- Dad Builds Son Prosthetic Hand With 3-D Printer
- Dalai Lama is on CIA payroll
- Dallas Clarke defames non Jews
- Dallas Clarke jewish Paedophile from North Sydney
- Dallas Clarke Judicial Watch
- Dallas Clarke of judicialwatch & Ekky Software
- Dallas Clarke of judicialwatch.org.au fabricates stories
- damascus
- DAN GERTLER
- DANGEROUS IMPORTED FOODS
- Daniel Andrews the Pedo
- Daniel Wyoming
- Darius J Wright Interview – Soul Trap Shape of Earth Reincarnation OBE Dreams Purpose of Life
- Dark Secrets Of The Jewish Diamond Industry
- Data from the New Zealand Ministry of Health shows that the COVID vaccines have killed over 10 million worldwide
- David Bowie the paedophile Jew
- David Cameron’s Jewish Roots and the Jews Who Brought Him to Power
- David Duke Storms the Alex Jones Show
- David Icke
- DAVID ICKE – ROTHSCHILD ZIONISM
- David Icke: Was he right?
- David Koch Zionist slams Schapelle Corby
- David Letterman
- David Motari the dog killer
- David Raynard violent criminal
- David Rockefeller
- David Rockefeller's Shocking Confession
- David Schulberg
- David Wilcock
- Day before 911
- DDOS Attack by the Jews to our server
- DEA caught smuggling drugs into USA
- Dead German bodies from the Rhine meadow camps presented as Jewish bodies for the Holocaust Hoax
- Dead Jewish Terrorist
- Dead MI6 CIA Syrian Rebel
- Dean Baquet
- Dean Clifford Titles and Trustees – How to win in Court
- death
- deaths
- debate
- Decayed Meat Treated With Carbon Monoxide
- Decayed Meat Treated With Carbon Monoxide To Make It Look Fresh At The Grocery
- Deep Inside The Dupont Factories Where Teflon Was Being Made
- defend
- Defended his freedom against zionism
- Defending Israel is Elemental to Being an American
- Defending the name of JESUS against the Yeshua crowd
- Defense Base Act Class Action
- deism
- deist
- Deliberate Dumbing Down of the World
- Delimiter
- democracy
- Democracy is an illusion
- democrat
- Denmark annual dolphin slaughter
- Denmark hotels
- Denmark Jewish Governments stage Terrorist Attack
- Denmark Jews Legalize Beastiality
- Denmark Jews love animal sex
- Denmark royals
- Denmark Tours
- Denmark yearly mass dolphin slaughter
- Denmark zoo that killed Marius the giraffe puts down four lions
- Deport All Jews
- Design
- destroyed for Rothschild
- destroying farmlands
- Detective inspector Mathew Woods
- Detox from chemtrail poisoning
- Diana Deidan
- Diana Faked Her Death
- DICK CHENEY AND THEIR DRUG EMPIRE
- Dick Cheney's company invented Fracking
- Dick Smith food products
- Did Israel's Mossad Do 9/11?
- Did you know that Sandalwood has Anti-Cancer Properties
- Digilife online Pty Ltd ebay scams
- Dinosaurs Never Existed!
- Discouraged worker
- discoveries in Santorini about the Lost Atlantis
- Discovery of Oil in ISRAEL Ten Times Larger than World Average
- District Attorney's Office
- Disturbing images from Iran you rarely see
- DNA science finds Jews to be Turks
- Do not buy anything made in New Zealand.
- Do not donate to RSPCA
- Do you drink milk? Eat cheese ice cream etc?
- Doctors Earn $3.5 Billion in Kickbacks from Pharmaceutical Companies
- Doctors More Dangerous than Germs
- dod
- dod contracts
- Dodo cops blame for national internet outages
- DOES THE VATICAN HOLD YOUR MORTGAGE
- Dog cries from his dead owner
- Dog dies after being dragged by Porsche
- DOG DUMPED IN GARBAGE BIN ON NSW FAR NORTH COAST
- Dog Interacting with a Beautiful Child with Down Syndrome
- dog left in hot car outside Moss Vale Bilo
- Dog Meat Festival in China a massacre event taking place every year
- dog rescues another dog
- Dog saves family from Cobra attack
- Dog shot by police in Holly Hill recovering
- Dog theft rises in NSW
- Dog tied to back of car and dragged
- Dog used as bait to be ripped to pieces by fighting dogs
- Dog watching Marmaduke on TV
- Dog's paws belly severely injured after possibly dragged by car in Clewiston
- Domayne Computers Alexandria
- Domestic terrorists that serve and protect their Zionist Masters
- Don't believe in israels media machine
- Don't buy Apple iphone etc
- Don't tease Kermit the frog
- Donald Drumpf – Illuminati Jew
- DONALD TRUMP A CRYPTO JEW
- Donald Trump Jr & Eric Trump cowards
- Donald Trump Jr & Eric Trump killing rare animals
- Donald Trump Jr.'s big game hunt in Africa
- Don’t Let Bayer Overturn The Ban on Bee-Killing Pesticides
- Donmeh Jews
- Doping and animal cruelty allegations hit jewish greyhound racing industry
- Doritos contain MSG and GMO corn
- Dr Mehmet Oz
- Dr Oz Show
- Dr Philip Zelikow's Key Role in 9/11 Cover-Up
- Dr Stan Litras Dentists speak out Against Fluoride 22Sep2013
- dr vicky jennings reportedly dropped dead after suffering a sudden heart attack
- Dr. Andrew Moulden: Every Vaccine Produces Harm
- Dr. Faudci’s NIH division partly funded a lab to experiment on dogs
- Dracula TV series
- Dracula was a Jew
- dragon power
- Driving without License taken to court and DISCHARGED !!!
- drug smuggling the jewish way
- Drug trafficking in Australian Government
- Drugs and the CIA organised crime
- DuckDuckGo owned by Jews
- Dumb people become Police officers
- Dummy guide: Chemtrails (poison) compared to Contrails (condensation)
- Duped Americans bow the knee to the Jews’ monetary idol Satan
- duped by RSPCA
- Dyson DC35 Animal beware! Save your money.
- E-Cigs Have 10x More Cancer Causing Ingredients Than Regular Cigarettes
- Early Australian Zionism (1894-1927)
- Earth files
- Earth’s Alpha Predator: Zionist Mafia
- Ebola virus patented – by the zionists that created it.
- economic
- Economics & Markets
- Edinburgh – The real Jerusalem
- Editors Picks
- Edomites
- Education does not make you smarter
- EDWARD SNOWDEN IS MARK ZUCKERBERG’S COUSIN
- egg industry
- egg industry grinds baby male chicks alive
- Egypt puts 19 Americans on trial
- Egyptian archaeologists unearthed the ruins of a temple for the ancient Greek god Zeus
- Egyptian Revolution: What You’re Not Being told
- Egyption Pyramids
- Eight Jews suspected in alleged gang rape of 11-year-old girl in north
- Eisenhower's German Death-Camp
- Ekky Software kiddie fiddler
- el dorado gold mining
- Eldad Hagar
- elect
- electing
- election
- electoral
- electoral college
- electorate
- Electric car cemetery in France
- Electric car company Tesla has released ALL its patents to the public
- electro magnetic fusion
- Elena Kagan is an Associate Justice of the Supreme Court of the United States
- elephants of africa
- Elijah the pit bull shot twice left for dead but survived
- Elite Underground Tunnels and City Completely Stocked March 2013
- Elon Musk is Jewish
- Elon Musk is Part of the Illuminati Charade
- Elon Musk just another scammer
- Elon Musk quality
- Elon Musk scammed me
- Elon Musk the scammer
- End Anti-Semitism
- End Anti-Semitism Now
- Endive juice
- Energy
- Energy Drinks Contain Ingredient Extracted From Bull Urine And Semen
- Energy in the vacuum
- Energy Weapons used to start fires again
- England’s Jewish Aristocracy
- Enviroment
- Ephesians 6:12 KJV
- erdogan
- Eric Clapton is blowing the whistle on Jewish supremacy around the world
- Eric Clapton: "Israel runs the world."
- Eric Harroun worked in Syria for CIA
- Erin Rosthschild at the Super Soldier Summit
- Eros Association
- Esau / Edom
- Estimated 190.000 German Women Raped by US Soldiers After WWII
- Estimation
- ET Council: War with grey-Draco reptilian ETs is won
- EU allows greater spying on citizens
- EU carbon Tax fraud
- EU Carbon Trade fraud
- EU regrets hosting rabbi accused of Holocaust denial
- Eugenics in Australia: The secret of Melbourne’s elite
- Eugenics ~ Chemtrail genocide
- European cloud computing firms see silver lining in PRISM scandal
- European jewish royals killing naked children for fun at human hunting parties
- European Jews history
- European royals killing naked children for fun at human hunting parties
- European Union
- European-Descended Jews are Counterfeits and have no Blood line to Abraham
- Evalion Shut Down!
- Ever wonder why all islamic Terrorists are white skin? (Mi6 CIA SAS Mossad)
- Every Cancer Can be Cured in Weeks – Video
- Evidence Obama Born In Kenya Goes Beyond 1991 Brochure
- Evidence of Hannukah Story Found in Razed Hellenistic Fortress
- Evidence that Food Proteins in Vaccines Cause the Development of Food Allergies
- Evidence: Denver and DC Quakes Caused by Nukes
- Evils of Kosher Slaughter
- Evolution is a hoax
- Ex Victorian Police officer comments on Fines
- Ex Zionist Jew Says the truth about Judaism
- Ex-Agent: CIA Seed Money Helped Launch Google
- Ex-Australian Prime Minister Confirms Israel Attacked America
- Ex-FBI Agent Reveals What to Do If The Police Get in Your Face
- Ex-Pentagon official: MKO is a dishonest creepy Jewish cult
- Executive Council of Australian Jewry Incorporated Terrorists
- Executive Order
- Extreme Fraud At NOAA And NASA
- Eye Health – Barbara O'Neill’s Warning
- fabricating the news
- face cream
- face mask
- Face Mask facts
- Face Mask Policy
- Facebook & Google are CIA Fronts
- Facebook (Jewbook) blocked me again
- Facebook banned me again
- Facebook CIA connection
- Facebook CIA Project
- Facebook Community Standards
- Facebook created by Zionists not by a student
- Facebook ends deal with Web Of Trust
- Facebook Faces US $15 Billion Lawsuit
- Facebook founder called trusting users dumb fucks
- Facebook Mark Zuckerberg
- Facebook seems to have ended their deal with MyWot and partnered with other more reliable services.
- Facebook stop using MyWot – web of trust and moved to McAfee SiteAdvisor
- Facebook story a Zionist lie
- facebook tagging
- Facebook truth
- Facebook warnings
- Facebook's Privacy Problems
- fact
- Fact Check .org
- Facts about Israel's Economy
- Facts about the Milk industry & animal cruelty
- Facts you should know about the zionist dairy industry and animal milk
- factual
- failing Holden Car Industry bailed out again $275million
- failure to pay SPEEDING CAMERA OFFENCE
- Fairfax Media Group Jews line the pockets of a Terrorist
- Fake Al Qaeda
- Fake Boston terrorists
- fake hebrews
- fake israelites
- fake jews
- Fake Jews continue to abuse Semite Palestinian Children
- Fake man on the moon footage 1969 Apollo 11 mission
- Fake Muslim Preacher Omar Bakri Busted as Jewish Mossad Mole
- Fake Muslims Behead Man In Cold Blood
- Fake Muslims damage 3000 Jewish owned vines in the West Bank causing $60000 in damages
- Fake Muslims Disembowel Young Christian Boy
- Fake Muslims Enter Christian Home Butcher Husband Wife And Two Children
- Fake Muslims Take Christian Children And Split Their Heads In Two
- Fake Muslims Take Christian Out Of Car After Finding Cross
- Fake Muslims Use Women To Lead Men On
- fake revolutions
- Faking It: How the zionist Media Manipulates the World into War
- False Flag attacks & the American Interest
- False Report shows Queen down to her last million
- Family Raided by SWAT and Dog Shot for Not Paying Utility Bill
- Famous People talking about the Jews
- Farm to Fridge – The Truth Behind Meat Production
- Farmer feeds GMO corn to his pigs: they all become sterile
- Farming the Unconscious
- Farrakhan Blasts Obama On Libya Bombing
- FBI gets access to Telstra records
- FBI Releases Documents proving Adolf Hitler and Eva Braun fled to Argentina in a Submarine
- FBI rescues 79 child sex slaves in massive three-day Jewish prostitution sweep across the USA
- FBI says 'Australian ISIS jihadist' is actually a Jewish American
- FBI: Hitler Didn’t Die. Jews moved Hitler To Argentina
- FDA approves spraying meat with viruses
- FDA Finally Admits Chicken Meat Contains Cancer-Causing Arsenic
- Federal Police and the corporate watchdog the Australian Securities and Investments Commission (ASIC) have been unwilling to investigate board members of the Reserve Bank companies
- FEDERAL RESERVE CARTEL & THE 8 FAMILIES THAT RULE THE WORLD
- Fedex
- FEMA Cameraman has Proof 9/11 was an Inside Job
- FEMA Camp Coffins
- FEMA Detention Camps Built in Australia
- FEMINISM & HOMOSEXUALITY – HOW HETEROSEXUALITY WORKS
- Fiat Currency is a hoax
- Fighting Cancer with Salad
- finance
- financial
- Financial Bailouts
- Finks bikie gang members and associates exposed
- Finland criminals
- Firefox Plug-in Warns Users of NSA Surveillance
- first Jewish synagogue in China was built in 1163
- First Torah Completed in Australia’s Parliament in Canberra
- five point plan
- Flat Earth
- Flat Earth at 70000 feet
- Flat Earth maps removed from the Bible
- Flat Earth Matters
- Flaxseed Oil and Cottage Cheese – A Cure For All Cancers? – Amazing results reported for almost every type of cancer including many in Stage IV.
- Flaxseed oil reflux and flu symptoms
- Florida Jews Agree to Distribute Satanic Temple Materials To School Children
- Flu Vaccine
- Flu Vaccine dangers
- Flu virus
- Fluorescent lights – Dirty Electricity
- Fluoridated Water Is Public Murder On A Grand Scale
- fluoride
- Fluoride Awareness Grows: No Science to Show Fluoride Prevents Tooth Decay
- Fluoride toxicity in water
- FLUORIDE TRUTH hits the TV in AUSTRALIA
- Fluoride Used by Nazis to Sterilize Inmates and Make Them Docile
- Fog Light laws
- FOIA
- Food additive Castoreum
- Food Companies that Serve You ‘Wood’
- Footage showing USA Secret Service assassinating JFK
- Forbidden Knowledge – History of the Jew
- foreclosure
- Foreclosure on Banks and Government via UCC filings by OPPT
- foreclosures
- Foreign Exchange currency trading scams
- Foreign Minister of Israel: Admits Murder in Europe
- Foreign Relations
- forensic labs
- Foreskin face cream from SkinMedica promoted by Oprah Winfrey
- FOREX Trading and Market Manipulation
- Former 9/11 Commissioner admits missile hit the Pentagon
- Former CIA Black Ops member confesses NWO plan
- Former CIA Head blows the lid off fraud wars
- Former CIA Officer Israel Controls U.S.A Government & Media
- Former FBI Chief ADMITS Government is Involved in Most 'Terrorist' Attacks!
- Former FBI Chief Ted Gunderson Admits Government is Involved in Most ‘Terrorist’ Attacks!
- Former Monsanto lawyer now FDA Czar leads raids on Amish organic producers
- Former Mossad Chief: "We've Been Involved in a Clandestine War For Quite Some Time With Iran"
- Former MP Terry Martin walks free having sex with a 12-year-old girl.
- Former SAS soldier Ben Griffin – I Will NOT Fight For Queen and Country
- Fossil Fuel hoax
- found 200 abused children and a cemetery full of ritually sacrificed children in Guatemala
- four generals of I.S.I.S Terrorist group
- FOX & NBC
- FOX Jews Attempts to Justify Police Brutality Against Children- So Russell Brand Let them Have It
- Fox News and the Royal Saudi Jewish owners
- FOX News Whistle blowers UNBELIEVABLE!!!
- France and Russia jews bomb Syria not ISIS .. killing children
- FRANCE – Joking about jews is illegal—but Muslims are fair game
- France is another Jewish Occupied Territory by the Jew World Order
- Frank Lowy 911 mafia
- Frank Lowy and 9/11
- Frank Lowy and World Cup Scandal
- Frank Lowy Institute
- Frank Lowy Institute of criminals
- Frank Lowy Zionism and 9/11
- Frank Lowy's Lichenstein
- Franklin D Roosevelt and Josef Stalin – Jews wanting to take down Germany
- FRAUD and LIES of Mother Teresa
- Fraud and Slavery Even a Child Can Understand It
- Fred Christ Trump
- Free America
- free energy circuits
- free energy cover up
- Free Energy Devices Yes They Are Real
- Free Energy Inventors and Mysterious Deaths
- Free Energy Researchers assassinated
- Free Gaza
- Free Masonry is another form of Judaism
- Free Palestine say Jewish Canadians
- free syrian army
- FREEMASON ILLUMINATI TARGETED ABUSE
- Freemason Jews
- Freemasonry / Illuminati started by the Jews
- Freemasons
- Freemasons open a lodge at Buckingham Palace
- French
- French are waking up to the Jew World Order
- French Jewish Governments stage terror attacks in Paris
- French Jews beheading Muslims in Morocco 1912
- French Jews demand Twitter reveal IDs over hate speech
- Fresh food people my ass!
- From Chemtrails to Pseudo-Life: The Dark Agenda of Synthetic Biology
- Frontline is useless not good for flea control
- fsa
- Fuck Israel!
- Fuck the Police!
- Fukushima nuclear blackmail
- Future of Mankind REVEALED | Lisa Wetsel
- G7W aka David Raynard (Stadler) is a convict
- g7w of mywot – David Raynard the convict
- Gaddafi a true hero to his people – killed by the Jews
- Gaddafi and life in Libya – facts you cannot deny
- Gaddafi fake Death photo exposed
- Gaddafi gold for oil plan
- Gaddafi's double killed – real Gaddafi still alive
- Galactic federation of light
- Galactic federation of light Deception
- Galactic federation of light is a scam created by the CIA
- Galactic Messages
- Garden of Eden Depicted in Ancient Greek Religious Art
- Gardeners discover bag of Jewish ISIS flags in Israel
- GEET Plasma Reactor Motor
- geithner
- Gen. Dempsey
- Gen. Martin Dempsey
- Gender Equality Ambassador
- Gene Simmons says gentiles are for manual labor
- Gene Simmons: I haven’t slept with 4600 Jewish women
- Gene study settles debate over origin of European Jews
- General Emil Strainu Confirms Reptilian ETs
- General Motors
- General Wesley Clark: Wars Were Planned – Seven Countries In Five Years
- Genetically Modified Cholera Bacteria to be Released in Australia
- Geneticist Traces Mysterious Origins of Native Americans to Ancient Greece
- genetics
- GENTILE INTERMARRIAGES WITH THE ROTHSCHILDS
- geoengineering
- Geoengineering Parliament documents HAARP Chemtrails
- Geoengineering: Destroying Antarctica to drill
- Geoengineering: Destroying the Atmosphere
- George Floyd
- George Galloway – Jesus was a socialist
- George Galloway Destroys Jewish Zionist Argument In One Swipe.
- George Galloway rips fox news about Cuba
- George Galloway speech on Israel Zionism and Palestine
- George Galloway vs Ignorant American
- GEORGE PELL’S RITUAL ABUSE CRIMES
- george soros
- George Soros a Jew with a false Greek name
- George Soros buying flooded farmlands
- George Soros Nazi Jew
- George Soros the Zionist Nazi with a fake greek name.
- George Soros Uses 'Human Rights' To Get Off Criminal Charge
- George the brave Jack Russell Terrier who saved five children
- George W. Bush
- Geranium robertianum L
- German
- German Jews were the NAZIS
- German police storm home of elderly woman who debated the Jewish holocaust lies
- German Television Exposes Holocaust Lies
- German Zionists officers served under Hitler
- Germans Refuse to Return Picasso Painting Sold by Jewish Man Fleeing the Nazis
- Germany
- Germany arms Saudi Arabia Jews to protect Israel
- GERMANY MUST PERISH – JEWISH PLANS TO KILL GERMANS
- Getting women into the workforce was a good way for the Jews to trick the goyim that it was “progress” when really it was family destruction.
- GetUp links to Nazi jews
- Gilad Sharon the Satanic Lying Fake Jew
- Gina Rinehart's Jewish Father
- Giraffes gunned down for family holiday 'fun'!
- Glass Steagall
- Glass Steagall Act
- Global ban on glyphosate – Monsanto GMO Jews
- Global Child Sex Slave Trade run by Jews
- Global Earth Agenda debunked
- Global Map of Genetically Modified Crops
- Global porn ring: WA detective jailed over child images
- Global Research
- global warming
- Global Warming Scam
- globalists
- GM food banned in Monsanto canteen
- GM Foods Linked to Organ Disruption in 19 Studies
- God
- God showed the rainbow to Noah
- God will destroy America if you dont love israel
- God-given reason
- Going GM-Free in Europe But Not USA
- Goji Juice
- GOLD = Cursed Prison Of Souls
- gold buried beneath the world trade centre
- Gold Coast Police investigated over protection racket around Jewish organised criminals
- Golden Dawn
- Golden Dawn another Jewish Psyop to create friction
- Golden Dawn strikes fear into the heart of the Jews that run Europe
- Goldman Sachs’ role in killing democracy across Europe
- Google adsense account banned or website blocked
- Google AdSense ad serving has been disabled to your site
- Google Adsense is a scam
- Google Adsense Scammed Me
- Google alternative Search Engine
- Google created by the CIA
- Google Earth Lead Developer Believes World Is Flat
- Google Jews suppressing the truth
- google news
- Google Page Rank Checker
- Google reports 'alarming' rise in censorship by governments
- Google Youtube aka CIA censorship
- GOP VOTING FRAUD CAUGHT ON TAPE AGAINST RON PAUL-Georgia county
- gordon duff
- Got Cancer? Milk poisoning cover-up Fox whistle-blower of Monsanto
- Goulburn NSW Police organised crime ring exposed
- Goulburn Police assault and taser Bowral man to death
- Goulburn Police detective Mathew Wood anti semite nazi
- Goulburn Police inventing stories again
- Goulburn Police LAC inspector detective Mathew Wood Racism anti semitic assault on Chris Roubis
- Goulburn Police LAC Racism anti semitic assault on Chris Roubis
- Goulburn Police LAC Racism intimidation and assault on Chris Roubis
- Goulburn Police Paedophile ring exposed
- Goulburn Police Racism anti semitic assault on Chris Roubis
- Goulburn TyreMasters pathetic
- Government continues to bailout failing Industries
- Government Employees are even worse than Welfare recipients
- Government Hollywood Pedophiles & Cannibals
- Government Shutdown No Problem: CIA Drug Money Funds Chemtrails
- Governments are Corporations do not submit
- Governments control your weather
- Governments poisoning us on purpose
- GPS is a ground positioning system not satellites
- Graffiti on Captain Cooks Cottage two days out from Australia Day
- Grand Capital Pty – forex trading
- Grand Capital Pty – LiqPay – privatbank scams
- Graphene in vaccines
- Graphene Oxide in Anesthetic
- Gravity is a hoax – MIT Professor debunks it
- Great Vegan Athletes
- Greece bailout an idiots view
- Greece has been voted ‘Best Cuisine in the World’ for 2024/2025
- Greece please don't give money back to the Jewish Banksters that lost it all into their pockets
- Greece sold out for $340 billion
- Greece's Jewish Golden Dawn Political Party
- Greek (Jewish) leaders discuss Athens debt crisis anew
- Greek Cities in Turkey
- Greek coins from around the world
- Greek connections of Norway
- Greek Egypt
- Greek Jewish Government busted: Sister Of George Papandreou Owes State Almost Half a Billion In Taxes!
- Greek Orthodox Church of Zionists
- Greek Riots
- Greek True History
- Greek Village Calls Golden Dawn To Protect Them From Jewish Gypsy Crimes
- GREEK-SPHINX- DELPHI MUSEUM GREECE
- Greeks fighting back against their Zionist Jewish Government
- Greeks in ancient Egypt
- Green news
- green power
- Green River Bar
- Greens MP John Kaye speaks out about RSPCA scams
- Greta Thunberg’s handler Luisa-Marie Neubauer is a Rothschild
- Greyhound Racing
- GTMobile best mobile plans and network
- Guatang people refuse to pay road tolls
- Guest Post, Christianity, Islam, Friends, Politics, Philosophy, Humor, History, Accounting, Quotes, Nature, Musings, Environment, Work, Lifestyle, Drama, Women, Men, Research, Spirituality, Random Tho
- Guillotines In America
- gulf states
- Gun charge against former election candidate Mark Aldridge is dropped
- Gun Laws prevent good people from defending themselves
- Gun Store Running AR-15 Giveaways on Facebook Sees Page Shut Down
- Gunter Pauli: The Blue Economy
- GWEN TOWERS (Ground Wave Emergency Network)
- HAARP
- HAARP 2011 2012 Earthquakes
- HAARP and Chemtrails in Australia
- HAARP Australian weather weapon
- HAARP bases around the world
- HAARP bases world map
- HAARP Chemtrails working well. Strange bird formations \ birds dying all over earth
- HAARP clouds in Australia Geo Engineering
- HAARP connection in Japan earthquake
- HAARP Floods Being Created to Intentionally
- HAARP in Australia causing cyclones and floods
- HAARP over Japan skies before earthquake
- HAARP ring over NSW Australia
- HAARP ring produces possible tornado REAL TIME as it pulses
- HAARP ripple cloud effect hits NSW VIC QLD
- HAARP the economic terrorist weapon
- HAARP Warfare
- HAARP Weather Warfare CONFIRMED by History Channel
- Hague
- halal meat cruelty
- Half of Venezuela’s Jewish community fled under Hugo Chávez
- Halloween is satanic
- Hamas (Mossad) fired rockets from civilian areas during 2012 war
- HAMAS = Israel
- HAMAS = Mossad
- Hamas is a Creation of israel Mossad
- HAMAS is Israel
- Hamas works for israel
- Hammond Indiana police officer allegedly abusing his K-9 unit
- Hank Aaron Dead Two Weeks After Taking The Covid-19 Vaccine
- Hanukka origins
- Hanukkah Menorah derived from demonic origins
- Hanukkah origins
- Hard Proof Sydney Martin Place Hostage Crisis was a Movie Set
- Harms to Our Children's Health from Classroom Wireless Radiation
- Harvey Norman / Domayne not very australian
- Harvey Norman reviews are false
- Hatecrimes
- Haunted locations
- He couldn't move his four legs he lay exhausted on the street with many wounds on his body
- He tried to rush his daughter to the hospital after an ISRAELI BOMBING
- Health
- Health Benefits of Plum and Plum Juice
- Health Care fraud
- heating our planet
- Hebrew Bible
- Hebrew is Greek
- Hebrew or the So-Called Negro?
- Hebrew Roots Movement Exposed
- Heineken International promote dog fighting
- Hello my name is Tarkhan Batirashvili. My fake Muslim name Abu Omar al-Shishani
- Hells Angels president in court
- Helmsley Trust gives $22 million to Israeli institutions
- Help us campaign against the hypocrisy of the RSPCA
- HEMP REPLACES EVERYTHING MADE WITH OIL
- HEMP REPLACES THE OIL INDUSTRY
- Hemp seed oil Australia Made
- Hemp War Conspiracy
- hempstead
- Henry Ford Built a Hemp Car That Ran on Hemp Fuel 80 Years Ago
- Henry Kissinger and his ladyboy wife
- Henry Kissinger ordered the creation of AIDS
- Henry Speerin Paedophile/ sex offender NSW
- her shadow minister husband and former Health Secretary Patricia Hewitt were all linked to a group lobbying for the right to have sex with children
- Herb Robert’s Gift against Human Diseases: Anticancer and Antimicrobial antiviral antibacterial and antifungal
- HERE IS A VICTIM OF NELSON MANDELA WHO WAS "NECKLACED" WITH A RUBBER TIRE FILLED WITH GASOLINE
- here’s what the media WON’T tell you about Russia bombing Syria
- Hero cat tries to revive her mate
- Hero dog pulls another dog from oncoming traffic
- Hezbollah leader Hassan Nasrallah
- HIDDEN CAMERA EXPOSES Zionist programming in American Schools
- hidden ET evidences
- Hidden History – Egyptians in Australia
- Hidden King Marcus Manuel
- Hidden Towers Radio Frequency & Mind Control
- HIGH COURT OF AUSTRALIA trespass
- Highly Toxic
- Hillary Clinton Covered Up Pedophilia by Ambassador Who Was Obama and Hillary Donor
- Hillary Clinton Exposed Movie She Banned
- Hillary Rodham Clinton
- Hinduism
- History of American False Flag Operations
- History of complaints over Sydney abattoir animal cruelty
- History Of Prison Camps
- History of the Greek Bizantine Empire
- History of the Jew
- History of the Khazar Empire – todays Jews
- History Reviewed: When Jewish Chameleons Boast
- Hitler Escaped to Argentina & Died Old Age
- Hitler funded by elite Jews
- Hitler on Zionists/Jews
- Hitler the Gay NAZI Jew that loved Scatology
- Hitler was a British Agent
- Hitler Was A British Agent Tasked With Creating Israel
- Hitler was a homosexual prostitute in Vienna
- Hitler Was A Rothschild And So Was His Daughter Angela Merkel
- Hitlers Jewish NAZI soldiers
- Hitlers mass slaughter of semite palestinians for israel uncovered.
- Hitlers sexual tastes
- hoax
- Hollow Earth Revealed- Series
- Hollywood Holocaust Hoax cousins who last saw each other in Auschwitz meet for first time in 70 years
- Hollywood Jews exposed
- Hollywood Producer Claims Boston Bombing was a "False Flag Attack"
- Hollywood screenwriter C. Jay Cox caught molesting a boy
- holocaust
- Holocaust Hoax will become compulsory for all schools in Australia
- Holocaust HOLOHOAX! Steven Spielberg Exposed!
- HOLOCAUST is a Jewish Ritual
- Holocaust lie
- Holocaust lies by Zionist Karen Pollock: British MP intimidated
- Holocaustianity: Zionism’s Big Lie!
- Holroyd City Council attacks Greenpeace
- homes for veterans
- Homo sapien sapiens originated in Australia not ‘out-of-Africa’ – DNA evidence
- Homosexuality Is Part of Jewish Tradition
- Honey benefits
- Hope For Paws Animal Rescue
- Horrendous Child Abuse By Jews
- Horrible Jew Monster Gene Simmons Claims Whites Destroyed Rock Music
- Horse Racing kills
- Horse urine in Cocal Cola
- How Adolf Hitler helped the Jews
- How Australia disarmed everyone except the criminals
- How Britain France and Russian Jewish leaders double cross Germany..
- How Britain France Poland and Russian Jewish leaders started the war against Germany
- How Britains Biggest Racists and Financiers Created Zionism – by Mark Burdman
- How Bush's grandfather helped Hitler's rise to power
- How CIA Kills Countries – CIA economic hitmen
- How Convenient: Piece of 9/11 Plane Found in Manhattan? Feds Floundering to Save Their Asses
- HOW DOES THE JUDAIC CABAL KEEP THEIR CATTLE ON THE PAYROLL
- How Does The Pentagon Get Rid Of Millions Of Damaged Soldiers? OVER-Medicate Till They Die!
- How Facebook Secretly Foil Your Activist Plans against Zionism
- How Giant Patent Troll Intellectual Ventures Does Business
- How Greece Could Take Down Wall Street
- How Healing Our Bodies Will Dissolve The Matrix
- How israel created hamas
- How Jewish Face cream is made
- How Jews tore Europe apart
- How Long Will a Chained Dog Drink When it's Been Deprived of Water?
- How Many Starving People Does It Take To Create A Jewish Billionaire?
- How Pedophile Royal Saudis are Exploiting Syria's Girls
- How Putin is so successful in avoiding foreign Jewish spies
- How the Global Warming / Climate change Scare Began
- How the Israel Lobby engineered Islamophobia
- HOW THE JEWS CREATED THE ZIONIST KINGDOM OF ‘SAUDI’ ARABIA
- How the Jews fake Terrorism
- How The Jews Mock Jesus Christ
- How the Jews Treat Christians in USA?
- HOW THE ROCKEFELLER OIL COMPANY – THE BUSH DYNASTY – AND IBM … DID BUSINESS WITH NAZIS
- How the Turks invented the Jew
- How the Vatican created islam
- How the Weather is made in Australia
- How they fake Terrorism
- How to be a VICTIM
- HOW TO BE A ZIONIST SLAVE
- How to decalcify your pineal gland
- How To Defend Yourself Against Astral Energies
- How to destroy Chemtrails
- How to Detect RSPCA Deception in Court
- How to get a good EDUCATION
- HOW TO KILL A DRONE Airstrike:
- How To Make a Judge Run Out Of The Court Room
- How to Make an Orgonite Orgone
- How to Make Cancer Cure Hemp Oil Safely
- How to Make Medicinal Hemp Oil Safely
- How to spot a staged Terror attack by Jew World Order
- How to stop Alzheimer's
- How US Rabbis & Israel Traffic In Human Organs & Money Laundering
- How Zionism infiltrated the USA
- How Zionists Divide and Conquer
- http://intrapower.net.au/
- HuffPo Hypes ‘Ancient Christian Gay Marriages’
- Human baby meat served in 90% of American fast food places
- Human experiments
- Human Experiments by your Government
- Human Rights Campaign Demands Christian Schools Abandon Beliefs or Lose Accreditation
- human rights violation
- Human trafficking in Israel
- Human trafficking in Israel a $ 1 billion industry
- HW Bush Was a CIA Agent Involved In The ASSASSINATION of JFK
- hydraulic road plates
- Hydro Tasmania asked to explain cloud seeding in catchment day before flooding
- Hydrogen Peroxide Therapy
- Hydrogen vehicle system DIY
- I CREATED AIDS to DELIBERATELY DEPOPULATE HUMANITY – Dr Robert Gallo
- I support the Greek people against fascist banker tyranny
- I Warned the Syrians that the Jews Would Destroy Them
- I wish to resign and cease considering myself a Jew
- I'm a clinical lab scientist Covid-19 is fake WAKE UP AMERICA
- I'm a marine and I took an oath to defend the Constitution I didn't take an oath to defend these jewish banksters
- I'm Related To Dracula Says Prince Charles
- Ian R Crane NWO agenda
- Ian Thorpe is nervous
- Iceland Dismantles Corrupt Gov't Then Arrests All Rothschild Bankers
- Iceland revolution
- ierissos
- If you see this lady take off.. there is about to be another false flag attack
- If You Speak Out You’re ‘Suicided’
- iGen Night Vision 20/20
- illegal dog meat abattoir… RSPCA did nothing!
- Illuminati – Zionists in the Music Industry Exposed
- Illuminati Australia Canberra Kabbalah Qabalah
- Illuminati Exposed – The Video Alex Jones won't show or talk about!
- illuminati Jews exposed
- Illuminati Jews Terrorize Control Turkey
- illuminati members exposed
- Illuminati Symbolism: 2012 London Olympics
- Immigration Multiculturalism to divide and conquer
- imperialism
- Impersonation of police officers
- Import email accounts in Microsoft Outlook 2010
- In 1917 Jacob Schiff gave three hundred New York Zionists $20 million and sent them to Russia
- In ancient Greece bees were used on some of the earliest coins made in Europe
- In China zoo live Cows are being fed to Tigers to entertain tourists
- In Judaism Satan is God
- In WW2 the ashkeNAZIS Looted Artwork and blamed the Germans
- Indian Economy Is Finished! Another Rape Victim Of The Jewish Banksters.
- Indian plant compound gedunin kills cancer cells
- indigenous Australians came under the Flora And Fauna Act
- Infant-Felatiating Jew Rabbi ‘Accidentally’ Hacks Off Baby’s Penis
- Infinite Vacuum of Space
- Infomercials
- INSIDE JEWISH BOHEMIAN GROVE
- Inside Monsanto The Truth.
- Insider trading 9/11
- Insulting RSPCA can be expensive
- Integral Energy / Endeavour Energy a joke
- INTEL MUST CLOSE ITS PLANTS IN "KIRYAT GAT"
- Intel spy chip made in israel
- Intelligence
- International
- International Jesuit Tyranny
- international jewish drug company made a hit list of doctors who had to be "neutralised"
- international law
- Internationals Satanism – The Power Behind the NWO = Jew World Order
- Internet
- internet crimes
- Internet Trolls
- interview
- Invisalign no braces
- inxmail.com.au spam
- Iowa vote fraud
- IPSWICH Qld appearing in Propia Persona
- Iran Is Already Under Attack
- Iran is surrounded by terrorist USA bases
- Iran sentences 4 to death in biggest bank fraud case
- Iran sentences CIA operative to death
- IRAN: USA lies
- Iraq
- Iraq Whistle Blower Mordechai Vanunu our hero
- Ireland infowars
- IS – RA – EL What does the name Israel mean?
- Is Alex Jones A Zionist
- is CSG safe?
- Is Global Warming being caused by HAARP and Related Weather War Technologies?
- Is Hollywood run by the Jews? You Bet! they run everything nasty.
- Is Organic a Scam? – Nutrient Differences
- ISIS (CIA Al-qaeda israel Mi6) been treated in Turkey
- ISIS Terrorists EXPOSED 100% AS CIA OPERATION
- islam
- islam animal cruelty
- Islam has been Zionized
- Islam is Judaism
- Islam's influence in the creation of America
- Islamic Muslim Terrorists
- islamic terrorists are faked by Jews
- islamic Terrorists are just another Jewish scam
- islamic terrorists are not islamic – but jewish
- Islamic terrorists were invented by the Jews
- islamists
- Israel
- Israel 'faked al-Qaeda presence'
- Israel Admits Forcing Birth Control On Ethiopian – True Jews
- Israel among most corrupt developed states
- israel and its allies are terrorists
- Israel and its allies only goes to war against the innocent
- israel animal abuse torture
- Israel army wearing diapers so they stop shitting themselves
- israel biological weapons
- Israel bombing Palestinian schools with white phosphorous
- Israel celebrates successful 9/11 operation on Purim holiday
- Israel chemical weapons
- Israel children send love to palestine
- Israel creates fake deaths to blame Palestine
- Israel creates fake enemies – Chinese cyber attacks
- Israel cyber attacks
- Israel Defence Force talking shit to University students
- Israel did 9-11 by Alan Sabrosky Marine Vet US Army
- Israel Did Fukushima
- Israel driving America’s ‘welfare Cadillac’
- Israel Gov Jews Inoculates 30000 Children with Active Polio
- Israel has a nuke in New York City. Australia guilty of laying false debris trail for MH370
- Israel have Ron Paul in their pockets
- Israel imported 25000 kids for their organs
- Israel iron dome hoax
- Israel is a person not land
- israel is Hamas
- Israel is paying internet workers to manipulate online content
- Israel is the land of Satanists and Pedophiles
- Israel Jew Soldier learns about Karma
- Israel Jewish Blood Diamonds Protest 2014
- israel Jewish hands involved in Sudan civil war
- Israel Jewish Soldiers wearing diapers so they stop shitting themselves
- israel Jews attack young semite Palestinian boy to death
- Israel Jews Exposed! 2014
- Israel Jews IDF experts at fighting against unarmed semite arab women and children
- Israel Jews injects Palestinian prisoners with dangerous viruses – human experiments
- israel jews now plant knives after the kill palestinians
- israel Jews poison Palestinians water well
- Israel Jews pretending to be muslim terrorists again
- Israel Jews spraying sewage on Palestinian streets
- Israel Jews Threatens Europe With "Jihad Terror"
- Israel Jews Using Internationally-Banned Weapons in Gaza Assault
- Israel Jews White Phosphorus attacks on UN schools in Gaza
- Israel Lobbyist – We Need more False Flag attacks to Start War with Iran!
- israel missle defence hoax
- israel mossad website explains who ISIS is
- Israel Not looking for Peace Nor Talks But this…
- israel nuclear weapons
- Israel Products to boycott
- Israel Rushes to Rescue Al-Qaeda (CIA Mossad) Terrorists in Syria
- Israel secretly targeting US war veterans
- Israel soldier is haunted by the people he murdered
- Israel soldiers using children as human shields
- Israel Tanks verse Palestinian rocks. And our Jewish Media still call it a war?
- Israel tenticles in Australian Government
- Israel terrorists pretending to be muslims again
- Israel the Nuclear Hypocrite!
- Israel Torture Palestinian Children by Electric-Shocking
- israel using biological weapons on the genuine semite palestinians again.
- Israel using Hamas (CIA) to terrorize their own people to blame Iran
- Israel using make up to fake wounded for the media
- Israel Vaccine shots faked
- Israel wants no peace
- Israel wants WW3
- Israel warns about marrying American Jews
- Israel Was Behind JFK Assassination
- Israel world order
- israel's attack on Fukushima – Radiation Equal to 10 Hiroshima Bombs Every Hour Since 2011
- Israel's best seller exposes Jews fake history
- Israel's children learning the trade of hatred and racism
- Israel's chosen Christian Pastors – herding the sheep to Hell
- Israel's Hamas agents pretending to be muslim terrorists
- Israel's insult to American Jews
- Israel's iron dome missile defense is a hoax
- israel's iron Dome missle system
- Israel's Loyalty Oath Exposed
- Israel's Master Plan
- Israel’s soldiers detained 90 children last month
- Israeli children are allowed to carry guns by law
- Israeli Citizens Running American Australian French British Russian German Government
- Israeli jets dropped explosive-laden food cans as bait for starving displaced Palestinians
- israeli jew asher moses
- Israeli Jews Burn Greek Orthodox Church Land In Jerusalem
- Israeli Jews Harvesting Black and Hispanic Childrens Organs
- Israeli Mossad BUSTED for London Bombing
- Israeli organ-trafficking network busted in Turkey
- Israeli site shows photo of kids dressed as burning Twin Towers for Purim
- Israeli Soldiers Sexually Abuse Palestinian Children
- Israeli soldiers throw a DISABLED MAN out of his wheelchair as he went to help a girl the ISRAELIS had just shot & left to die.
- Israeli Students Paid $2000 Each to Troll the Internet
- ISRAELI tank murders CIVILIANS in a car for no reason!
- Israeli Terror WMD Facilities
- Israeli Terrorism Against America
- Israeli TERRORIST 'Nofar Mizrahi' who shot dead 17 Year Old
- Israeli zionists calling Jesus a stupid bustard
- Israeli's destroying Christian cemeteries
- Israelis Are Not Jews and American Leaders Are Not Christian
- Israelis torturing non Jewish children. 2014 Australian documentary film.
- IT News
- It was all Greek.
- It Was Greek Culture That Taught Us to Be Jews
- Italian Mafia are Jewish
- Italy's bishops pass Vatican-backed rule that child molestation does not have to be reported
- It’s Official: Fish Feel Pain
- Its even reached the stage where #ISIS souvenirs are openly sold in #Turkey #Zionist #Jew #Motherland
- Jack Welch
- Jacob Greenberg alias Mark Zuckerberg Facebook founder and grandson of David Rockefeller
- jacob rothschild
- Jacob Rothschild takes down Malaysia Airlines MH370 members of a patent semiconductor
- Jacquie Seemann | Partner THOMSON GEER – Sydney Jewish Laywers trying to take down our website
- JADE HELM/FEMA “Hanging Training” Photos Leaked
- Jakarta Catholic Nuns animal cruelty
- James Samuel Newbill left dog on chain to starve to death
- Janet Jackson
- Japan Offers to Enrich Uranium for Iran
- Japans Earthquake and HAARP involvement
- Japans tsunami
- Jason Warne Shane Warne conmen
- Jay Carney
- JB Campbell: “kill all the Jews now”— it’s them or us
- Jeff Rothschild helps the U.S Military censor civilians
- Jennifer Lopez who thinks it's ok to beat and anally electrocute animals for fashion!
- JEROME DALY HAD TAKEN ON THE BANKS THE FEDERAL RESERVE BANKING SYSTEM AND THE MONEY LENDERS AND HAD WON
- Jerusalem in the Quran
- Jerusalem's Western Wall hints sacred site NOT built by Herod
- Jesse Ventura – Secret Underground 2012 Base at Denver Airport
- Jesus
- Jesus Christ is NOT a Jew
- Jesus was born in Bethlehem of Galilee not Jerusalem
- jet fighters
- Jew admits "Holocaust" is a fraud and a PSYOP
- Jew Feminist Honcho Hates Having “White” Skin
- JEW FEMINSTS
- Jew gets kicked in the ass
- Jew in New York
- Jew Jon Ritzheimer staged anti islam rally now wants your $10 million for protection
- Jew List: 20% of the Richest People in Britain are Jews
- Jew posing as Islamic Leader Commands Female Genital Mutilation of Two Million Women
- Jew Rabbi raped boys inside synagogue
- jew ritual murder of gentiles (GOYIM)//Blood Libels & Sacrifice
- Jew spits on a Christian father walking peacefully with his son
- Jew tool of multiculturalism to demolish western civilization
- Jew Tunnels found in all synagogues worldwide
- Jew World Order
- JEW WORLD ORDER DECLARED 2014
- Jew World Order: Massive End The Fed Organizer in Germany Gets Car Fire Bombed
- Jew-liar Gillard
- JewBelong.org
- Jewess attacks man then cries wolf when man defends himself
- Jewess Founder of “Code Pink” Arrested for Subversion in Egypt
- Jewish alien/human hybrid bloodlines with all their close relatives dating back to ancient Khazar / Babylonia.
- Jewish Ambulance Service for Jews in New York
- Jewish America
- Jewish American Government terrorism
- JEWISH AMERICAN PEDOPHILES ARE ALLOWED TO FLEE TO ISRAEL TO AVOID ARREST
- Jewish ancestry a lie
- Jewish animal abuse
- Jewish animal cruelty
- Jewish archive of terrorist attacks
- Jewish Armed men attack Pakistan school
- Jewish Artwork
- Jewish ASIO agent In charge of mkUltra in Australia
- Jewish Australia Day
- Jewish “Sex Party” candidate tells Australian Jews to vote for her
- Jewish Banker's manual
- Jewish Bankers Declare U.S.A & Europe Conquered
- Jewish BBC NETWORKS – Mr John Nathan-Turner 1980s Producer of "Doctor Who"
- Jewish Blackmarket on ivory tusks
- Jewish Blood diamonds
- Jewish Blood Libel
- Jewish Blood Libel – Vampires are real
- Jewish Bolsheviks Murdered 66 Million In Russia
- Jewish British Royal Paedophile Ring
- Jewish Business Of Organ Trafficking
- Jewish Campaign to sell israel with crossbred Hotties
- Jewish child molesters that are never on the NEWS – WHY?
- Jewish child sex abuse
- Jewish Church of Scientology opens center in Israel
- Jewish CLEANSING OF REAL BRITISH aristocracy HISTORY
- Jewish College Offers Course Devoted Entirely To … PORNOGRAPHY
- Jewish Communist Dictum
- Jewish Conquistadors in the New World
- JEWISH CONTROL OF SAUDI ARABIA
- Jewish Corporate Welfare
- Jewish cotton farmers and black slavery in America
- Jewish Council in Greece has been looting Greece for years
- Jewish Crime Jewish Porn industry and Jewish prostitution industry
- jewish crisis actors
- jewish crisis actors for News Networks
- Jewish Cyber Attacks again on the Truth
- Jewish Democracy is a Dictatorship
- Jewish Depravity
- Jewish Drug Dealers
- Jewish Ex-Marine SPEAKS OUT on Israeli Involvement
- Jewish Expulsions and Exiles
- Jewish Facebook & Google are CIA Fronts
- Jewish Fake Holocaust Cremation Deaths Using 35 Year-Old Train Wreck Images
- Jewish False Flag attack – Counter Protest Shutdown Westboro Baptist’s Hate
- Jewish false flag attack crisis actors
- Jewish false flag operations
- Jewish food brands that will kill you
- Jewish food brands to stay away from
- Jewish Fox News gets owned by anti Zionist
- Jewish German Government Publication Promotes Incestuous Pedophilia as Healthy
- Jewish Germany
- Jewish God Moloch
- Jewish groups hail Obama’s executive action on gun control
- Jewish Gypsies attack greek towns
- Jewish hand behind the internet
- Jewish History
- Jewish history is a big lie
- Jewish History Professor Maury Wiseman denies Native Genociode and expells student
- Jewish Holocaust a lie
- Jewish Holocaust busted wide open
- Jewish Holocaust completely exposed
- Jewish Holocaust denial banned speech in the court room.
- Jewish Holocaust Enforcers killing non believers
- Jewish Holocaust exposed
- Jewish Holocaust Hoax – real footage
- Jewish Holocaust is a lie
- Jewish Holocaust real footage
- Jewish Holy Book quotes
- Jewish human organ trade in turkey stealing Syrian children
- Jewish Human Organ Trafficking
- Jewish invasion of Iraq
- Jewish inventor of ADHD admits it was fraud on deathbed
- Jewish Involvement In The Black Holocaust and Slavery
- Jewish irish slave trade
- Jewish Judge drops charges against duo over animal-torture videos
- Jewish Judge Patrick Durcan jails Holocaust denier
- Jewish kidney brokers sell organs from poorest nations on black market
- Jewish kids paint swastikas on synagogue “out of boredom.
- Jewish Knights of Malta created the CIA
- Jewish leaders demand Farrakhan denounce "Secret Relationship" book
- Jewish lie about spreading democracy to every country they invade.
- Jewish lies
- Jewish lies by the Media
- Jewish Mafia
- Jewish mafia controls the Fed Reserve and Central Banks
- Jewish Main Stream News Networks using Crisis Actors to create The News
- Jewish Man Exposes Israel's Lies
- Jewish man photographed covering himself in plastic bag during flight to separate himself from the filthy non jews
- Jewish masonry is influential in USA
- Jewish Meat industry
- Jewish Media Brainwashing
- Jewish Media claims British Royal Queen is poor. Here is the proof.
- Jewish Military arm is USA
- JEWISH MONSANTO FAMILY Were Jewish Slave Dealers And Owners
- Jewish Monsanto GMO food featherless chickens
- Jewish mother 'waged war on Christmas' and got their public school to cancel the holiday field trip
- JEWISH NAZIS
- Jewish New World Order
- Jewish News
- Jewish News Media Networks breaking News about a Jew that twisted his ankle.. yet no story about Jewish Terrorism
- Jewish Occult Connections
- Jewish Occult History of Canberra Governments
- Jewish Organ Harvesting – Where do the organs go?
- Jewish organ trafficking Center where kidnapped Syrians are stripped of their entire bodies.
- Jewish Organised Crime Lords
- Jewish Origin of Saudi Arabia and Wahabs Iraqi Intel Reported Wahhabis Are of Jewish Origin!
- Jewish origin of Sauds and Wahabs
- Jewish owned Google Facebook YouTube Yahoo Microsoft already delete forbidden truth articles and news that they don't want the public to know
- Jewish Paedophile Rolf Harris
- Jewish Parliament's porn habit revealed as 300000 attempts made to access Child Porn websites from work computers in last year
- Jewish peadeophile Dallas Clarke from Lindfield NSW
- Jewish Pedophiles
- Jewish Pharaohs reasons of Circumcision
- Jewish Pirates of the Caribbean
- Jewish Politicians Passing Bill to Ban Investigations Into Police Who Shoot Americans
- Jewish Pompeii turned into penis worship city
- Jewish Population from 1933 to 1948 got bigger not smaller.
- Jewish Porn industry XXX domain names now up for sale
- Jewish Porn site Xvideos is world's biggest
- Jewish Professor NOEL IGNATIEV calls for genocide says white males should commit suicide
- Jewish propaganda against North Korea
- Jewish Propaganda continues defaming Gaddafi as an evil Dictator to justify their invasions in Lybia
- Jewish protection racket
- Jewish protocols in governments
- Jewish Psyops against Germany exposed
- Jewish puppet regime – Sri lankan Army
- Jewish rabbi explaining why destroying Europe with mass migration is a good thing.
- Jewish rabbi: “Jews need to keep Muslims and Christians fighting”
- Jewish racism and hatred
- Jewish Refugees
- Jewish Religion Is a Fairy Tale
- Jewish representation in universities
- Jewish Ritual Child Killing
- Jewish Ritual Murder
- Jewish Ritual Murder – Synagogue of Satan
- jewish Ritual Murders Up to the Year 1840
- Jewish Russia
- Jewish Satanic Catholic Mass Grave Sites Of 350.800 Missing Children
- Jewish Satanic group says Oklahoma must give the devil his due
- Jewish Satanic High Priests in Hollywood
- Jewish Satanic Rituals in Governments
- Jewish SAUDIS PURCHASING THE BLOOD OF SYRIAN CHRISTIANS!!!
- Jewish scams & lies
- Jewish School courses
- Jewish School Courses Devoted Entirely To … PORNOGRAPHY
- Jewish school system introduce masturbation in fourth grade
- Jewish Secrets Of The Synagogue
- Jewish Soldiers hold guns and try to prevent man from planting olive tree
- Jewish Soldiers Served Hitler and the Nazis
- Jewish student caught painting Swastikas on her own door then claiming Anti-Semitic Attack
- Jewish Supremacism: My Awakening
- Jewish Syrian Rebels (Mi6 Mossad CIA) Caught Using Captured Prisoners As Suicide Bombers
- Jewish Takfiri terrorists strangulate Syrian girl in public
- Jewish teacher busted spreading racism and hatred against islam with lies to students.
- Jewish teen girl: “I’m a Jew and our Bible says that you’re like animals”
- Jewish teens say they vandalized Israeli synagogue out of boredom
- Jewish Terror and Tyranny in Russia
- Jewish Terrorist factory
- Jewish Terrorist groups – ADL = JDL
- Jewish Terrorists Bombed King David Hotel in Jerusalem
- Jewish Tradition
- Jewish Tymoshenko intercepted phone call – 'it's time to grab guns and go kill those damn Russians'
- Jewish Tyranny
- Jewish University Academics Say Pedophilia Is Natural and normal
- Jewish USA's depleted uranium shells deforming even animals
- Jewish Victim Card
- Jewish welfare group knows it is sheltering a paedophile
- Jewish woman becomes a demon when confronted by a street preacher in Israel.
- Jewish woman manifests demons after street preacher mentions Jesus Christ
- Jewish Woman Talks About Child Ritual Killings by the Jews
- Jewish Woman Talks About Ritual Killings
- Jewish World Bankers the real Drug Lords
- Jewish World masters of slavery
- Jewish World Order
- Jewish World War 1 & 2
- Jewish Zionism
- Jewish zionist criminals
- Jewish Zionist EDUCATION Minister Christopher Pyne
- Jewish Zionist terrorist groups
- JEWISH ZIONISTS SACRIFICE BABIES!!!!
- Jews
- Jews
- Jews "Raping the Women of Conquered Europe"
- Jews (Khazars) desperate to suppress the Holocaust hoax
- Jews – the infiltrated tribe of Judah
- Jews = Zionism
- Jews admit they are an invention
- Jews against Zionism
- Jews always owned Germany
- Jews always Pretending to be Muslims and Christians
- Jews and Opium Wars
- Jews and the Black Holocaust
- Jews and their creation of islamic terrorists and suicide bombers
- Jews and their Opium Wars
- Jews are Al Qaeda terrorists
- Jews are anti semite
- Jews are anti Semitic
- Jews are just a concept
- Jews are just a lie
- Jews are Khazars
- Jews are Khazars – anti semitism
- Jews are Khazars – Jews are Counterfeits and have no Blood line to Abraham
- jews are the anti christ
- Jews arrested after 250 child prostitutes ‘raped and branded with tattoos
- Jews arrested for harassing spitting at Gentile woman
- Jews attacking christians
- Jews – Modern Day Neanderthals
- Jews Banished 47 Times in 1000 Years – Why?
- Jews Beheaded King Charles in 1649
- Jews behind China buying up American companies fast
- Jews behind China buying up Australia
- Jews behind Covid19
- Jews behind Terrorist Bombings world wide
- Jews blood diamond trade exposed
- Jews born to kill
- Jews celebrate 911
- Jews challenging the people of East Ukraine with disastrous loss of human life.
- Jews Claim Jewish Jack the Ripper Only Killed Hookers Because of Antisemitism
- jews control new zealand
- Jews Control the Federal Reserve by Majority
- Jews created AIDS virus
- Jews created China
- Jews created fairytale al-Qaeda
- Jews created islam
- Jews creating islamic fear
- Jews Cry Persecution as Denmark Bans Animal Torture
- Jews crying wolf again in their own Mainstream News networks
- Jews cut palestinian boy arm off
- Jews declare war on Germany
- Jews defame Mel Gibson with fake twitter accounts
- Jews defaming opposition again
- Jews did 911 – CNN
- Jews DNA study settles debate over origin of European Jews history
- Jews do not exist
- Jews don't want blacks in their cemetary
- Jews expelled 1030 times
- Jews expelled from 109 countries since AD250
- Jews faking terrorist groups
- JEWS FIRST DECLARED WAR ON GERMANY IN 1933
- Jews first weapon of choice is World Slavery
- Jews from Europe arrive in Palestine 1947
- Jews harvesting the blood of the young
- Jews have been Expelled in 109 locations since AD250
- Jews have ruined every economy on the planet for their own profit.
- Jews hold mass prayer against peace talks
- Jews honoured on Australia Day for supporting Jews
- Jews importing African Invaders Destroying Southern Italy
- Jews in Australia create racism so we can fight each other so they can divide and conquer us
- Jews in Europe Hiding Their Identity More Often
- Jews invent enemies then send non jews to die fighting for them
- Jews keep Attacking Mel Gibson
- Jews kidnap Palestinian child from his father’s car for satanic ritual
- Jews kidnapping children For Sex – For Human Experiments – for organ trafficking – and for Blood Sacrifice to Moloch.
- Jews kill 2 Greek Golden Dawn members in drive way
- Jews kill 20 million in Congo
- Jews kill 66 Million christians in Russia
- Jews kill 66 Million Russian christians
- Jews killed more than 3 million Vietnamese people 2 million of them were Vietnamese civilians.
- Jews killing nature to produce a GMO synthetic world to control
- Jews know how to suck cock better than anyone
- Jews lead gun control ban to control the goyim
- Jews love sex with Children – Judaism Rules
- Jews love to suck dick
- Jews murdering Africans and looting African resources then when Africans flee into israel.. Jews don't want them
- Jews now want Mali: Gold: Africa’s third largest gold producer
- Jews of England Arrested in 'Coin-clipping' Scandal
- Jews of the IRA Terrorist Group
- Jews own Australia
- Jews own China
- Jews own the Black voice
- jews pay mexicans to wear jew disguises and protest gay pride parade
- Jews pay no tax
- Jews performing rituals on dead bodies to bring back their messiah
- Jews plant knives after they kill Palestinians
- Jews poison christian wells
- Jews posing as Muslim ISIS Terrorists – busted again
- Jews posing as Muslim Terrorists again- here's proof!
- Jews posing as Muslims openly want Shariah law implemented
- Jews posing as Muslims to push Sharia Law
- Jews pretending to be Muslim Terrorists again- here's proof!
- Jews Produce New Definition of ‘Holocaust Denial’
- Jews promote killing pregnant women and children
- Jews promote Rap to spread violence
- Jews Promoting Racism Again
- JEWS promoting Sharia law
- Jews Rule of the Supreme Court of the United States of America
- Jews Run the World
- Jews selling foreskins and sodomising babies
- Jews sharing pics of killing semite palestinian children again
- Jews shot children while eating chocolate and chips
- Jews Shun Their Own for Reporting Child Sexual Abuse
- Jews started WWI and WWII and many Wars past and present.
- Jews steal credit for every invention humans make
- Jews still looting our economies regardless.
- Jews sucking China dry
- Jews teach masturbation techniques inside a church
- Jews teaching children sex lessons in Kindergarden
- Jews the inventors of Communism and Satanism
- Jews today
- Jews torture and massacre priests nuns and choir boys in Marxist upheavals in Spain
- JEWS TRAUMATIZED AT GRAPHIC ANTI-ISRAEL DISPLAY IN AMSTERDAM
- Jews upset over NAZI salute in reverse
- Jews use Measles vaccine in Syria to kill up to 50 children
- Jews use media PSYOPs to dupe and subvert the gullible goyim
- Jews used China to bring in the NWO
- Jews wear many Masks
- Jews were invented
- Jews who suck the blood of true Frenchmen
- jews zionism world order
- Jews/Mayors Arrested For Harvesting Illegal Organs!
- Jews posing as Muslims to hate Christmas again
- Jews who run prisons finding many ways to fill their pockets with tax payers money again
- JFK death faked
- JFK praises Adolf Hitler
- JFK real killer
- JFK secret society speech before assassination
- JFK speech before he was assassinated
- JFK was assassinated after this speech
- Jill Abramson
- Jim Rogers
- jimmy carter
- JIMMY SAVILE- THE KRAY TWINS- CLIFF RICHARD
- Jobs & Careers
- Joe Hockey $270 a night to sleep in his own house
- John Hopkins University
- john howard masonic pedo jew
- John Kerry Crypto Jew
- John Lennon ''Show business is a extension of the Jewish Religion''
- Johnson & Johnson
- Johnson & Johnson Jews
- Joint Chiefs of Staff
- joke
- Jon Faine zionist
- jordan
- Joseph Goebbels
- Journalists in Syria killed by CIA rebels
- JP Morgan & the Saudi Arab Jewish Oil Colony
- JP Morgan silences (kills) 12 Bankers
- Judaism Incorporated is a criminal enterprise.
- Judaism Synagogue of Satan
- JUDAISM the religion of Death
- Judaism's Strange Gods
- Judaism’s Strange Gods
- Judeo christianity
- Judge condemns badger baiters who laughed as their dogs ripped animals apart
- Judge Napolitano
- Judge rules against ANZ late fees in a win for customers
- Judge rules Bank Of America foreclosures unconstitutional
- Judge who headed 'Drag Queen Story Hour' sponsor arrested on child porn charges
- Juicing cannabis miraculously saves lives
- Julia Gillard and Hillary Clinton playing Epstein Island dress ups
- Julia Gillard AWU corruption
- Julia Gillard Govt pays their Zionist boss Murdoch of Sky News $2m
- Julian Assange – Wikileaks on israel's payroll
- Julian Assange's The World Tomorrow: Hassan Nasrallah
- Julian Assange's Ties to Nazi Jew Cult
- Jury Rights Billboard Campaign Infuriates Prosecutors
- Justice Elizabeth Fullerton Supreme Court NSW
- Justice system corruption allowed Eugene McGee to hit and kill a cyclist
- K9 DOGS
- Kabbala
- Kalash: The Lost Children of Great Alexander
- Kamala Harris fooling you
- Kangaroos slaughtered each year by Jewish Australian Governments
- Karen Hudes a CIA PsyOps
- Karen Hudes Exposed
- Karen Hudes interview
- Karens General Store / New Berrima Post Office
- Karens General Store Circus of Horrors
- Karens General Store Mafia
- Karens General Store New BErrima
- Karens General Store New Berrima Washing away Petroleum spills into storm water drains
- Karens General Store Organised Crime family
- Katherine Lisa King kept dogs in bunker for years
- Kellogg's Loves GMO Contamination
- Kelloggs cereal deadly
- Kelloggs Cereals
- Kelloggs GMO Corn flakes
- Ken Caldeira – Captain Chemtrails
- Ken O'Keefe: "I'm Ready to DIE [for Gaza]
- Kerry Stokes Australia’s number one perjurer
- Kevin Richardson – The Lion Ranger
- Kevin Rudd did not want to become Israel's puppet
- Kevin Rudd kicked out of office by Israel Zionist Jews
- KFC – not real chicken
- KFC Environmental health investigation
- Khazaria / Babylonian King ordered them all to convert to Judaism
- Kick out the Jews from the Greek Government
- kidnapping
- kiled
- kilkis
- kill
- killer
- Killing America
- Kim Beazley Human Sacrifices
- Kim Kardashian – porn star
- King edward VII
- King George V
- King of kings
- King Tut the European Egyptian's
- Kingdom of God
- Kingpins and Cutouts Aliens and Hybrids
- Kings Charles & The Good Bishop.
- KKK – klu klux klan and the NAZI Jews
- Klaus Schwab’s NAZI roots FINALLY TRACED
- Klu Klux Klan were Jews
- Knight of Malta George H.W. Bush
- know the lies
- Know Your Enemy (Jesuits and the Vatican)
- KONSTANTINOS PLEVRIS VS EBRAIOI
- KONY 2012 CIA scam exposed
- Kosher Halal animal cruelty
- Kosher Slaughterhouse
- Kosovo Liberation Army
- Ku Klux Klan
- L'Oreal products tested on animals and Palestinian children.
- Labor and Liberal members vote *against* a Federal anti-corruption commission
- Labour chiefs: It’s OK to have sex with 10-yr-olds
- Lady GaGa the German italian Jew
- LAGRANGE MISSOURI POLICE kill innocent dog
- Lahood Motors are criminals
- LAND CLAIM AGAINST PARRAMATTA CITY COUNCIL SERVED BY CONQUEST BY SOVEREIGN DE JURE
- LANG HANCOCK ON STERILIZING ABORIGINES 1984
- Laser Pointers Banned In NSW Users Face $5000 Fine
- Last good Cop fired for reporting bad cops
- Laurastar China made Junk
- Laurastar do not buy one
- Laurastar iron systems great deals
- Laurastar steam iron massive sale
- Laurastar steam iron ripoff – unreliable – expensive to fix
- Laurastar steam irons
- Laurastar steam irons 2012 review
- Laurastar steam irons China made. Reliability issues. Expensive to fix.
- Laurastar steam irons pathetic
- Laurastar steam irons wholesale prices
- Law institute of Victoria pedophiles
- Law Student "Schools" Policeman On His Gun Rights
- Lawful Disobedience: ARREST THAT JUDGE!
- Leading Israeli Rabbis Defend Manual for For Killing Non-Jews
- Legal burden of proof
- Lemuria: The Hidden History of Mankind's Motherland
- lending
- Letter from Albert Einstein in 1948
- Li Zongwen from Wuhan
- Lib Dem Baroness Tonge quits party over Israel remarks
- Liberty Kennedy missing persons
- Library Apologizes For Hosting Rainbow Dildo Butt Monkey to Entertain Children
- Libya
- Libya Tripoli still want Gaddafi
- Libya vs Zionist USA morals
- Libya War – Voices of Deceit – President Sarkozy
- libyan
- LIBYAN GRAVE SITE OF ABU SALEEN PRISON IS FAKE
- Libyan president Gaddafi & Saddam murdered for introducing the gold dinar
- Libyan president Gaddafi murdered for introducing the gold dinar
- Libyan War update Sept 22 .. the truth!
- LIBYAN WOMAN RAPED MUTILATED BY NATO ARMED GANGS IN LIBYA
- Life
- Life Saving Colloidal Silver
- Like all things… Syrian civil war was created by Zionist Jews
- Lindt cafe shootout Martin Place Sydney
- Lindy Chamberlain the Satanic Sacrifice
- Link between HAARP and earthquakes
- Lion Nathan Tooheys New beer
- Lionel Nathan Rothschild
- Liqpay scams
- List of Companies Using Aborted Human Fetal Cells As ‘Flavor Enhancers
- List of Greek warriors inside the wooden horse at Troy
- list of toxic sanitizers is surging—now at 75
- Little puppy-dog Star was left to die all alone in a box…
- Living
- Living in the Private
- Local Government and Councils are illegal
- London Jewish Cannibals
- Lord Justice George Fulford paedophile
- Lord McAlpine (child abuser)
- Lord protect us from the jews
- Loreal animal testing
- Lost Jewish Empire Uncovered in Russia
- LOUIS FARRAKHAN – U.S. Shadow Government Truth Arab Spring IRAN War with CHINA & RUSSIA
- Louisa Hope – Jewish Crisis Actor of Sydney's Lindt Cafe siege
- M.D
- Maccabees were Greeks
- Maccabees were Jewish fake Greeks
- Macdonalds Kelloggs Kraft KFC serve you wood
- Macdonalds pushes vaccines
- Macedonia (Greece)
- Macolm Turnbull the cat killer Jew
- Macquarie bank corporation owns YOUR ROADS
- Made in China
- Madeleine Albright Defends Mass-Murder of iraqi Children
- Madeleine McCann found
- Madonna the satanic Jew of Kabbalah
- Mafia Jewish Manipulation Of Gold
- MAGA
- Magna BSP
- Majestic group
- Majestic/illuminati using alien technology to cause a catastrophe
- MAJESTY TWELVE
- Making a Killing: The Untold Story of Psychotropic Drugging – Full Movie
- Malala
- Malala Yousafzai
- Malcolm X fake death
- Malicious libel from WEB SHERIFF jews claiming I am infringing copyright
- Man attacks UNICEF fundraisers raising money for Gaza
- MAN BEATS COURT BALIFFS & PREVENTS EVICTION ON HOME REPOSSESSION
- Man charged over the deaths of 25 ponies
- Man cures his spinal meningitis with raw foods
- Man Haron Monis ASIO agent
- Man left to die outside Dandenong police station
- manhattan
- Many world’s leader’s worship Satan
- Map of Ptolemaic Egypt
- Marching to Zion
- Marco Daniel Rusterholz framed for murder by Corrupt Zionist Government
- Margaret Sullivan
- Margaret Thatcher Funeral £8Million
- Margarine was originally manufactured to fatten turkeys
- Margie Abbott – merchant banker at Rothschild
- Marijuana a Cure for Cancer
- Marijuana Cannabis Weed Pot Oil Extract
- Marijuana Cannabis will never be legalised
- Marina Abramovic
- Mark Aldridge – Police don't like my blogs
- Mark Zuckerberg
- Mark Zuckerberg and human trafficking on Kauai Hawaii… Another Epstein island.
- Marketing scams
- Martin Dempsey
- Martin Luther King was another Masonic Controlled Opposition just like Hitler.
- Martin Place Sydney CBD terrorist seige – false flag staged attack by government
- Mary Sparrowdancer
- Masonic club
- Masonic pedophile gene rosen FEMA worker – sandy hook actor
- Mass grave uncovered containing dozens of Palestinians killed in 1948 war that founded Israel
- Masters of Deception
- Match.com online dating scam
- Matthew Guy starved his pet dog to death
- maurice strong
- Max Delezenne
- May 15 1991 the driver killed Kennedy
- MAY 20/21 2012: Illuminati occult rituals and human sacrifice during the "Ring of Fire" annular eclipse
- may all Jews die now
- McDonald's real meat scam
- McDonald’s Australia Uses Worm Meat Fillers But Can Legally Call It 100% Beef
- McDonalds Burgers fund israel war crimes across the globe
- McGrath Foundation fraud
- McGrath Foundation scam
- MCGRATH FOUNDATION scams
- MCGREGOR CASTING – New Documentary TV series
- Meat and Dairy — Cause Cancer
- meat and milk production
- Meat From Diseased Animals Approved For Consumers
- Meat is illness
- Media Brainwashing That Puppet Masters Script Mainstream News Reports
- Media use actors to fake news
- Medical Cannabis for Epilepsy Treatment
- Medical marijuana cannabis
- Medical Marijuana in Australia
- Medicine and the Law
- Medicine Hijacked by the Jews
- MEET Oogy – found in a dog fighting ring
- Meet the 'Crisis Actors' of the Syria-'FSA'
- Meet the Charlton McCallum Hunting Safaris zionist cowards
- Meet the Scherffs alias The Bush Family of Jews
- Mel Gibson against the Jew World Order
- Mel Gibson shares the truth
- Mel Gibson vs Roman Polanski
- Melissa Bachman banned from South Africa
- Message from the Galactic Federation of Light 3/23/12
- Message FROM the Militia to Civilians 2012 STAY STRONG STAND FIRM & UNITED!
- Message to Police
- Messages from our Galaxy
- Met Police murder dogs
- Metallica – James Hetfield kicks dogs
- Method of curing AIDS with tetrasilver tetroxide molecular crystal devices.
- Mexico 7.9M Earthquake PRE-PLANNED = MAN MADE
- Mi6
- MI6 SAS CIA rebels
- Miami Police Shot Protester then laugh about it.
- Michael Baden
- Michael Charles Dyson did Port Arthur Massacre
- Michael Jackson molded by Jewish hands
- Michael John Darby cheating on Vanessa Darby
- Michael Savage now admits Bilderberg Group is in control of the economy
- Michelle Obama in the 80's
- Michelle Obama Is A Man!! MUST SEE!!
- MICROWAVE COOKING is Killing People!
- Microwave radiation from mobile phone towers is almost certainly destroying bees
- Microwaves "nuke" your food at a cellular level
- Microwaves absolutely decimate the nutritional value of your food
- Middle East
- Mike Bozzuto the pedophile Jew
- Mike Jine
- Milk
- Milk industry
- Milk Industry animal cruelty
- Million Vets March Clashes with DC Police
- Milosevic
- Mind Control & Conditioning
- mines
- Minneapolis Police start Riot
- miraculous Graviola tree
- Missing Children
- missing gold at world trade centre
- mistake
- mitt romney
- MK-ULTRA. CIA program on Mind Control.
- Modern Education makes you dumb
- Moloch the Jewish God of child sacrifice
- money
- money laundering
- Monsanto
- Monsanto Attorney now Supreme Court Justice
- Monsanto food control
- Monsanto GMO Crop seeds are poison
- Monsanto growth hormone in milk
- Monsanto Guilty! France convicts big ag firm of chemical poisoning
- Monsanto hired mercenary Blackwater to infiltrate anti-GMO groups
- Monsanto is destroying us
- Monsanto NWO depopulation plan GMO food
- Monsanto Owned Companies (DO NOT BUY LIST)
- Monsanto Roundup deadly to all
- MONSANTO wants to kill the bees to make way for its “super bee”
- Monsanto's got a place in government FDA
- Monsanto’s Infertility-Linked Roundup Found in All Urine Samples Tested
- Monsanto’s Jewish Supremacist History
- Monsanto’s Roundup causes birth defects Cancer and DNA damage.
- Monsanto’s Roundup is Killing Human Kidney Cells
- Moon Hoax By Way Of Hollywood
- Moon Landing
- Mordechai Vanunu the hero
- More AWU Funds rorting by Julia Gillard and friends
- more dogs die in police care
- More fake Gaddafi Horrors Exposed
- More False News by Zionist media networks to convince us to hate the muslims
- More Jewish Terrorism
- More proof Jews origins are Turkish Khazarian not hebrew.
- More proof that Israel and its Zionists run Australia
- More smoke bombs by HAMAS (Mossad)
- More Than 22000 Brave Nurses Refusing to Submit to Mandatory Vaccinations
- More Than 40000 Orthodox Jews Hold Rally About Risks of Internet
- moscow
- mosquitoes used to spread our Governments lab made diseases – bio warfare
- Mossad & CIA death squads behind Syria bloodbath
- Mossad In Syria
- Mossad made up fairytale al-Qaeda
- Mossad still wearing their Star of David when they pose as islamic Terrorists
- Mossad Truck Bombs on Sept 11 – 911
- Mother of Islamic Terrorism is the Jews
- Mother Of Obama’s Murdered Gay Lover Speaks Up
- Mother Teresa the fraud
- Mother Teresa Was A Zionist Crook And A Fraud
- Movie: Wilding
- Mr. Mal Davies published the truth about RSPCA is cruel
- MULLAWAYS MEDICAL CANNABIS
- Multiculturalism is a weapon of war
- Multiculturalism is a zionist war weapon.
- Multiculturalism the Jewish tool for destroying civilizations
- Multiquip Transport assault and threats Boral Cement
- Multiquip Transport harassment and threats
- Multiquip Transport terrorizing New Berrima
- Mummified Baby Depicting Elitists Sacrificial Beliefs?
- murder and mystery [Catholic Church Exposed]
- Murdoch's media malpractice and the genetic altering of human beings through DNA vaccines
- Murdoch’s papers didn’t report on Ghislane Maxwell's arrest
- Murdock ruined rival competitor iTV by hacking their system
- Mushroom cancer cure
- muslim
- Muslim animal cruelty
- Muslims outraged at police advert featuring cute puppy
- Muslims in Burma became flesh food for Buddhists working for the Jews World Order
- Mycenean Greeks in Pretani (Britain)
- Myobrace no braces for children
- Mysterious Honey Discovered That Kills All Bacteria Scientists Throw At It
- Myths Of The Jews
- MyWOT – scams with facebook
- myWOT app is dead folks
- myWOT convicts
- myWOT criminals in real life
- MyWot Reviews – MyWot Trustworthiness Exposed
- mywot toolbar is a spyware – proof available
- MYWOT Web Of Trust Review: MyWot.com can’t be trusted!
- mywot.com – Unethical Company SCAM
- MYWOT.COM Has a POOR Reputation!
- mywot.com loses in court
- mywot.com web of mistrust
- mywot.com web of trust scam
- N.A.S.A : Alien Spacecraft & Moon Ruins
- Nader
- Nala – Scared stray Pit Bull living in a ditch – rescued!
- Naming and Shaming – The List Of Israel’s Agents Within British Politics
- Nancy Pelosi and JFK
- Nanites in our foods
- Nanotechnology Found In Popular Food Products
- Napoleon began to become Jew-wise
- NASA – Proof Of Image Tampering/Censoring
- NASA admits chemtrails
- NASA admits chemtrails – 10 July 2013
- NASA caught deleting UFO photos from its website
- NASA engineer admits they can't get past the Van Allen Belts for space travel
- NASA fake images vs Flat Earth
- NASA Fake Mars rover landing
- NASA Lies
- NASA space challenger crew still alive
- Nasa's Biggest Secret
- natalie ellis dog bowl
- NAtional socialists and ZIonists. The result is a NAZI Party
- Nationofchange.org run by George Soros the NAZI Jew
- Native American
- Native American 10 Commandments:
- Native Americans never scalped people
- Native Greeks riot over Jewish Government again
- NATO Crimes In Libya
- NATO Turkish airlines exec on arms shipped to Islamists (Jewish Regimes) in Nigeria
- Natural Cancer Cures that work
- Natural Flavoring Made From Anal Secretions of Beavers
- Natural News
- NAZI coins
- Nazi Eugenics program being revived in USA
- Nazi Hunter Vic Alhadeff can’t tolerate Holohoax jokes even though he is one
- Nazi Jew Pope Benedict XVI
- Nazi Jew Queensland police woman calls Aborigines 'scum bags' and 'oxygen thieves'
- Nazi Jew Vic Alhadeff
- NAZI Jewish Plutonium experiments on humans
- NAZI JEWS
- Nazi Jews Being Funded With U.S Tax Dollars Again
- NAZI JEWS invasion of Iraq
- NAZI NATO JEWS FUCK OFF!
- Nazi treasure
- NAZI Vatican Jews that control the CIA and the world
- Nazi zionist Eugenics program being revived in USA
- NAZIS
- ndaa
- NDS hacking executive James Murdoch
- Neighbours from Hell New Berrima
- Neil Armstrong Refuses to Swear on Bible that he Walked on the Moon!
- Nelson Mandela & ANC IS A COMMUNIST JEWISH FRONT
- Nelson Mandela Was a Terrorist
- Nelson Mandela Was a Terrorist for the Jew World Order
- neotame aspartame – artificial sweeteners will kill you
- NESTLE EXPOSED "Buy a chocolate and fund a zionist"
- NESTLE’S INVESTMENT IN ZIONISM
- netanyahu
- Netanyahu Worked Inside Nuclear Smuggling Ring
- NEVER AN HONEST JEW
- NEVER DONATE TO MCGRATH FOUNDATION
- Never trust a Jew?
- New 9/11 Eyewitness Evidence of Bombs at WTC
- NEW 9/11 FOOTAGE.
- New Berrima
- New Berrima General Store & Post Office
- New Berrima General Store filth and smell
- New Berrima General Store serving Rat feces and bird Droppings
- New Berrima Post Office
- New Berrima residents in Southern Highlands inhale Boral Cement dust everyday.
- New Berrima Store – No Food Safety
- New Berrima Store Post complaints
- New Born Calf saved from dairy farm
- New Israel Fund Australia Foundation
- New Natural Cancer Treatment
- new revenue streams
- New Study Finds Organic Diet For One Week Drops Pesticide Levels By 90 Percent
- New Study: Vaccinated Children Have 2 to 5 Times More Diseases and Disorders Than Unvaccinated Children
- New Testament
- NEW WORLD ORDER PLEDGED TO JEWS – New York Times in 1940
- New Years eve Sydney 2014
- New York Jew artist creates 'art' that is invisible and collectors are paying millions
- New York Jewish Rabbis Have Now Infected 14 Babies with Herpes After Sucking Their Penis
- New York Police proud of the Israel symbol on his bullet proof vest
- New York Rabbis Have Now Infected 14 Babies with Herpes After Sucking Their Penis
- New York Time
- NEW YORK TIMES
- New York Times Admits It Pushed Fabricated Evidence about Iraq Syria and Ukraine
- New York: More Babies Get Herpes from Penis-Sucking Ritual
- New Zealand Herald covers up reasons for sacking anti-Zionist cartoonist
- New Zealand importing China foods
- New Zealand vegetables are from China
- News
- News Media Press
- News media using actors to create news
- News Specimen, Breaking News, USA, UK, Europe, Africa, Asia, China, Japan, India, Government, Political Parties, Inspiration, Media, Random Blog, Culture, Arts
- Newtown Connecticut School Shooting a Hoax false flag operation
- Newtown CT School Shooting a Hoax false flag attack
- Nick Balgowan exposed!
- Nicki Minaj butt and tit implants
- Nicolas Sarkozy France's new President is a Jew
- Nicole Kidman’s Father Silenced by Ninth Circle Satanic Cult
- Nine news
- Nixon Tapes
- NO DRIVER LICENSE REQUIRED IN THE USA or Australia
- NO MORE ANIMAL CRUELTY
- No need to stop for the Police
- No Planes Hit the Towers on 9/11
- No War for Israel in Syria and Iran !
- Nobel Peace Prize
- Nokia N9 outlook synch failure music transfer failure
- norway
- Norway and its Greek origins
- not a charity
- Nothing in Woolworths bakery actually tastes any good
- NOTICE to all Australian Police
- NOW THE GOVERNMENT CAN LEGALLY KILL CHRISTIANS for the “crime” of worshipping Jesus Christ!
- NSA Mass Surveillance
- NSA whistleblower – Jews did Fukushima nuclear disaster
- NSA whistleblower Fukushima nuclear disaster – israel jews did it
- NSW BN BN97716141
- NSW Crime Commission Corruption
- NSW Jewish Board of Deputies arrested
- NSW Jewish satanic cults
- NSW Justice System corruption
- NSW owned by USA shareholders
- NSW Police Corruption
- NSW Police Minister Mike Gallacher resigns over corruption
- NSW Police ordered to pay legal costs to Rickey Caton and Adam Antram over toy dinosaur incident
- NSW POLICE SEIZE MULLAWAYS MEDICAL CANNABIS PTY LTD
- Nuclear Bomb hoax
- Nuclear smuggling by the Jews
- NWO Insider Reveals Entire NWO Plan in 1969!
- nypd
- NZ Christchurch Mosque shooting staged
- NZ secret ties with USA
- Obama did PsyOps for the CIA
- Obama dies in front of media audience. No one believes all that crap any more
- obama gay scandal
- Obama goes to a school to talk to the kids
- Obama Jewish puppet is donating 300 million US dollars to groups that will destabilise Syria.
- Obama to nominate Jewish economist Janet Yellen as new Fed chief
- Obama's Alleged Homosexual Past
- Obama's foreign Advisor
- Obama's pedophile brother
- Obama: A Rothschild Zioinist Jewish Puppet
- OBAMA; THE ROTHSCHILDS CHOICE FOR PRESIDENT
- Obama’s Gay Past Being Hidden By Killing Ex-Lovers
- OBE Master Given UNFILTERED ACCESS to HUMANITY'S FUTURE on the OTHER SIDE! | Darius J. Wright
- Obesity and Depression
- OC 9/11 Truth organizer threatened
- Occupy Corporatism
- october surprise
- Of Interest
- Ofcom
- Office of Public Prosecution to face child sex abuse
- Ohio criminal David Raynard aka g7w
- OIC says Nigeria abduction ‘barbaric’ – Boko Haram a Jewish Terrorist puppet regime
- Oil is NOT a 'fossil fuel'.. it can never run out
- Oil is Not a 'Fossil' Fuel – Origins of Oil
- Oklahoma City bombing False Flag attack tapes missing says FBI
- Oktoberfest Was Invented by Jews
- Oldest coins were Greek
- Oldest Pyramid is in Greece not Egypt
- Oldest Recipe Found in Egypt Written in Greek
- Oldest soccer ball in the world found in Greece
- Olympics 2024 Paris
- Oneflare.com.au spam
- Only a free Press can root out corruption
- Oogy: The Dog Only a Family Could Love
- open your eyes
- Operation Paperclip
- OPPT Courtesy Notice – Success Stories
- OPPT UCC filings
- OPRAH SAYS "IT FEELS GOOD TO BE MOLESTED AS A CHILD & IF DONE RIGHT THE CHILD SHOULDN'T REMEMBER"
- Oregon Man Sentenced To Jail For Possession of … ILLICIT RAINWATER!!!
- Oregon Shooting Exposed: another staged terror shooting by the Jew World Order
- Organ Donor truth
- Organ trafficking: Rabbis arrested over massive crime ring
- Organised Crime and Real Terrorism looks like
- origins of the Jewish German Swastika
- Osama Bin Laden hired by the CIA
- Osama bin laden neighbors say there's no way he lived there
- Osama bin Laden: Closing the Case on an Innocent Man
- Our Governments are drug dealers
- Ozemite supports Jewish Terrorism
- Paedophile group crimes against fathers exposed
- Paedophile Peter Nolan
- Paedophile rings protected by police and politicians in Australia
- Pakistan animal cruelty
- Pakistanis caught eating dogs
- Palestine Gaza News
- Palestine Genocide
- Palestine Holocaust
- Palestine is Greek not Arabic or Jewish
- Palestine news
- Palestinian Child Kicked by Border Police in Hebron
- Palestinian children used as sex slaves and human experiments
- Palestinian civilians escaping Gaza being hunted down.
- Palestinian Holocaust by the Jews continues
- Palestinian Holocaust lookout
- Palestinian Journalists targeted in Israeli attack for exposing the truth
- Paltalk racist user – Cups_of_Kiwi
- pandemic
- Papal and Crown Officers Ordered to Stand Down by Court
- PAPER INDUSTRY and more
- pappas-xasisi ipie kai o theos
- Paralyzed Puppy Thrown in a Trash Can Gets Rescued
- Paris Hilton a crypto Jew
- Paris Jewish mayor joins calls to ban comedian
- Paris staged terror
- Parkland High School Shooting – banned video
- Parliamentary debate on RSPCA prosecution issue scheduled
- Parramatta Council corruption
- Parramatta Shooting: another staged terror attack in Australia
- parti quebecois
- passengers
- PASSOVER
- Passover is the Jewish celebration of murder
- pastor's wife turns him in after finding 'tens of thousands' of child porn files on his computer
- pathological Jewish liar and all the others like him!
- Patton On Communism And The Khazar Jews General Patton's Warning
- Paul Keating Necrophilia
- Paypal billionaire Peter Theil
- Peace Maker Society Interview/HIRING LOCAL PEOPLE WORLDWIDE VIDEO!! (APPLY NOW Worldwide)
- peace noble prize
- pedal cars
- pedal power
- Pedigree DentaStix for dogs made in Hungary
- Pennsylvania Judge Sentenced For 28 Years For Selling Kids to the Prison System
- Penny Auction scams
- Pentagon lecturing on vaccine designed to disconnect human soul
- Peodophile group crimes against fathers
- Peodophile ring crimes against fathers
- Peoples reaction to Margaret Thatchers death
- PEPSI USING ABORTED FETAL CELLS IN SODA FLAVORING
- Perouse Services Pty Ltd
- Personating public officers of the crown
- Perth Radar Detector Shop exposed
- Perth Western Australia
- Perth Western Australia – radars.com.au
- Pet friendly policies in rental properties
- PETA kills more than 95 percent of pets in its care
- Peter Alexander Thomas – Dog cruelty case shock
- Peter Andrew Nolan sex offender
- Peter Andrew Nolan talks about harming his wife and children with one blow
- Peter Garrett the Zionist puppet
- Peter Nolan
- Peter Nolan
- Peter Nolan banned in facebook Political Groups
- Peter Nolan domestic violence offender
- Peter Nolan exposed
- Peter Nolan psychopath
- Peter Nolan slanders his victims
- Peter Nolan sociopath
- Peter Nolan victims
- Peter Nolan You grubby grubby turd!
- Peter Nolan you've had your ass kicked every time
- Peter Nolan's crimes against fathers child porn ring
- Peter Nolan's crimesagainstfathers.com
- Peter Nolan's family law court
- Peter Pan the Neverland pedophile
- Peter Sellers Freemason
- Peter Williams QC New Zealand Drug Lord Paedophile
- Petrea King and Quest for Life Foundation in Bundanoon is another charity scam
- Petrol Price Fixing Cartel in Southern Highlands NSW
- Pharmaceutical Industry will not cure you
- pharmaceutical/medical industry suppress knowledge of any cures for profit
- Philadelphia Experiment
- Philadelphia Marijuana Activists Due in Federal Court this Week
- Photo of Man Punching Dog: Real or Hoax?
- Physicists Find Evidence That The Universe Is A 'Giant Brain'
- Pieta Morgan – no justice in QLD
- Pig rescues baby goat
- Pilot admits the Earth is flat
- Pine Gap laser weapons testing
- Pine Gap military weapons testing
- Pirates of the Suburbs – Councils Destroying Communities
- Pitbull saves 2 women from cobra attack
- Planet Earth Ascension 2012
- Plastic Jews
- Please do not leave your Pets outside
- Please get "Sergeant Bansect" OFF the market
- Plutonium From Japan In Europe Now
- PM Tony Abbott the criminal Jew
- poisoning rain water
- Police Abuse
- Police are not Government
- Police corruption
- Police crime
- Police Fraud: Re: Driver License Fraud
- Police Left K-9 Dog Unit in Car Until it Died
- Police Officer In Court On Animal Cruelty Charges
- Police officer shot dead after pointing stun gun at man’s dogs
- Police Prosection
- Police Scotland ask are you a freeman on the land
- police state
- Police think Sovereign people are Militants
- policies
- policy
- Polio Vaccinations Are Now The Number One Cause of Polio Paralysis
- Polish Jews killed tortured raped 15 million German civillians
- political
- politician
- Politicians stay away from Vaccines
- Politics
- Pompeii and the Jews that love Penis
- Pompeii the Jewish city of the penis
- pope
- Pope Benedict XVI
- Pope's decree about to cause mass resignations?
- Popular flea collar linked to almost 1700 pet deaths. The EPA has issued no warning
- Pornographic Material downloaded inside the Vatican
- Pornography sex slaves prostitution… Why are these businesses dominated by Jews?
- Port Arthur Massacre
- Port Arthur massacre – false flag attack – How Australians lost their gun rights
- Port Arthur Massacre false flag operation
- Pot 'cured' brain cancer
- Poultry Industry
- Poverty is caused by Zionism. Eliminating Poverty does not make money for Zionist Jews
- power
- power generation
- PP Pet dog killers
- Pr Chris Busby attacked for telling truth about Weapons Radiation & Remedies
- Pratt Foundation
- President Kennedy declared war on Rothschild's Federal Reserve Bank
- President Lincoln
- presidential
- Presstv
- Pretend Law
- pretend laws
- Prevent Disease
- Prime Minister Julia Gillard's salary to overtake US President Barack Obama
- Prince Andrew Pedophile is pictured inside pedophile Jeffrey Epstein’s £63million mansion
- prince charles
- Prince Harry at home among Jewish terrorists
- Prince William visits Jerusalem tomb of his great-grandmother Princess Alice
- Princess Diana found Alive
- Princess Diana’s Death and Memorial
- PRINCESS KATE TO END UP FEATURED ON PORN SITE?
- Princess Margaret nymphomaniac
- Princess of Wales and Dodi Fayed
- Printer cartridge scandal investigation
- Pro-Assad Rallies Held Across Syria Ignored By Media
- Producers of toxic BPA are now boasting $8 billion in sales for 2012
- Product Reviews .com.au
- Professor From Berkely College Says: People Do Not Die From Cancer! People Die From Chemotherapy And In Terrible Pain!
- PROJECT CAMELOT BILL WOOD
- Project Camelot interviews Dan Burisch UFO/alien phenomenon
- Prominent Australian entertainer arrested in relation to Jimmy Savile child sex investigation
- Prominent Zionist Vic Alhadeff sacked
- Promoting democracy behind dirty motives
- proof Catholic Church are Zionists
- PROOF Elite Jews Steal Hundreds Of Billions Using Fake Companies
- Proof Israel Jews sniping semite palestinians again
- Proof of Hamas fireworks compared to israeli rockets
- Proof that Christianity Is a Supernatural Method for the Jews to Enslave the Goyim
- propaganda
- Prostate Cancer Cured with Cannabis Oil
- Prostitution and Prejudice: The Jewish Role in Human Trafficking
- Protecting USA Banker's POPPY FIELDS in Afghanistan
- Protein Content of Green Vegetables compared to Meat?
- Protocols of learned elders of zion
- Psychiatrist of Israeli Prime Minister Benjamin Netanyahu Commits Suicide
- Psychiatrists assist Fraud in the Killer Family Courts by John Aster
- Psychic Detectives Have a Perfect Record
- PSYCHIC DETECTIVES POLICE CONFIRM PSYCHICS’ AND MEDIUMS’ GIFTS
- Psychopathy and Jews
- PTSD
- Public editor
- Public housing
- Purim – Jewish Blood libel
- Purina Lucky dog biscuits GMO grains and cereals
- Purple Tesla Energy Plates – Genuine Healing and Energy Plates and Jewelry
- purpose of education
- putin
- PUTIN – just another oligarch Jew
- Putin Foils The Jews In Syria
- Putin is a Jew
- Putin is Jewish Pawn says Russian Patriot
- Putin's Jewish Parents
- Pyramids
- PYTHEAS – THE GREEK EXPLORER WHO DISCOVERED BRITAIN
- Qantas
- qatar
- QLD owned by USA shareholders
- quadracycle
- Queen Elizabeth II House of Saxe-Coburg and Gotha "Windsor"
- Queen Elizabeth's Druid Ritual
- Queen escorted by Secret Society Nurse
- Queen Victoria
- QUEEN’S 2015 CHRISTMAS BOMBSHELL MESSAGE: 'ENJOY YOUR FINAL CHRISTMAS'
- Queensland Police Commissioner Ian Stewart
- Queensland police tied to major drug trafficking
- question
- QuiBids.com – Penny Auctions
- Quran
- Rabbi A. Romi Cohn has sucked 25000 baby penises
- Rabbi A. Romi Cohn has sucked 25000 baby penises – “it’s a joyous occasion”
- Rabbi Admits Israel did 911
- Rabbi admits the Holocaust is a Myth
- Rabbi admits to stealing millions from special needs school
- Rabbi admits: Islam is Israel's broom.
- rabbi Alan Jones the pedo arrested again
- Rabbi Alon Anava exposes the Jew World Order
- Rabbi circumcision sick ritual
- Rabbi explains who controls the world
- Rabbi Mordechai Rosenberg
- Rabbi on plane wears body condom to protect himself from Gentiles
- Rabbi revealed as key suspect in alleged baby trafficking ring
- rabbi vomits and assaults black lady with bottle to the head.
- Racism in Australia jewish made
- Racist Ashkenazi Jews in 1950’s Israel eugenically irradiated non-European Jews under guise of treating ringworm
- Radar Speed gun accuracy doubts
- Radiation treatments create cancer cells 30 times more potent than regular cancer cells
- Radical islam = crypto jews
- Radical islam is not islam
- Radio host Howard Sattler suspended after asking Julia Gillard if partner Tim Mathieson is gay
- rage
- Rail Guns and Laser Cannons
- RAJU the elephant who stole the world’s heart when he was seen crying when shown freedom after 50 years of brutal treatment
- Ralph Nader
- rape
- Rape of Iraqi Women by US Forces as Weapon of War
- Rats mice and cockroaches discovered by inspectors lurking in dirty NHS hospital kitchens
- Rawson Homes illegal fence
- Rawson Homes Review
- Rawson Homes Shonky Builders: Geoff Hanratty
- real animal charity
- real estate
- Real estate economics
- Real Jews are black
- Real Libyans rally for Gaddafi
- REAL NAZISM FROM THE REAL NAZIS
- REAL Reason USA Wants to Attack Iran -The Kaspian Gas Pipeline !
- Reason
- Reason Foundation
- Reason why your Government wont win the war on drugs
- Red Cross Raised $500M for Haiti but Built Only 6 Homes
- Red Cross Zionist Jews
- Red Heifer sacrifice
- Red Mafia are jewish
- Red Meat a Ticket to Early Grave – Harvard Says
- Red meat myths
- Religion
- religious violence
- Remember when the virus hunted down the unvaccinated?
- Remembering the Armenian Assyrian and Greek Genocides.
- Rense & Celente – Criminals Own The Government
- Rense & Rosa Koire – Agenda 21 Eco Terror War
- Report finds Jews descended from Turks
- Reporter Admits All the News is Fake!
- Reptilians are real
- Reptilians mummified remains
- republican
- Republicans
- Reputable Cheap Online HongKong Store
- Rescind a Traffic Ticket
- Reserve Bank of Australia
- Reserve Banks is owned by private Jewish banks
- Retired Police Captain demolishes the War on Drugs
- Revolution: It's Time To Rise
- Rhodes scholarships = Nathan Rothschild
- Rich Jews brainwashing Christians to blame the Muslims
- Rigged Australian Elections
- Rigged USA – Australian Elections exposed
- Rigged USA Elections exposed
- right!
- Rik Clay – Olympic 2012 Zionist Jewish Satanic Symbolism
- Ringling Bros circus animal cruelty
- RIP Michael Hastings.
- Road Refresher Non Spill Dog Water Bowl – Beware of Styrofoam
- Road Toll Dodger Santos Bonacci The Uncensored Truth
- Robert Borsak
- ROBERT EDMONDSON: “I TESTIFY AGAINST THE JEWS”
- Robin Williams got tired of his own bullshit. Preliminary Cause of Death Is "Asphyxia Due to Hanging"
- Robyn Speerin
- Rockefeller GLOATS About 9/11 in 1967!
- Rolf Harris arrested in UK sex scandal police investigation
- Roman Catholic
- Roman Catholic Jews created islam
- Roman Catholic Vatican Jews kill 68 million innocent people
- Ron Paul
- Ron Paul – sells out to the zionists – Endorses Israel's Attack on Iran
- Ron Paul on CIA Drug Trafficking
- Ron Paul: Israel created Hamas to counter Arafat
- Ronald Reagan dedicated the Space Shuttle Columbia to the Taliban
- Ronald Reagan says: Taliban 'moral equivalent of America's founding fathers'
- Ronan O'Gara refuses to shake the hand of Liz Saxe-Coburg Gotha ( Queen Elizabeth II )
- Rosacea & Acne Cure that works
- rose garden
- Roseanne Barr exposing the Holocaust
- Roseanne Barr Speaks out about the Jewish MK-Ultra in Hollywood
- Roseanne DROPS A BOMBS- Vatican- 911 -House of Saud- Rothchild – REVOLUTION TIME
- Rotary power
- Rothschild and family ties with British Zionist Royalty
- ROTHSCHILD CONTROL OF RAW MATERIALS
- Rothschild Family Net Worth 2024 (FORBES) $500 Trillion
- Rothschild Halloween Party
- Rothschild in Russia
- Rothschild inbred to keep the family blood
- Rothschild killing islamic banks and economies that charge no interest
- Rothschild's World Currency drives the World's slavery system
- Rothschilds & Goldman Sachs Destroying Greece again
- ROTHSCHILDS AND ZIONISM
- Rothschilds One World The Only World Power
- ROTHSCHILDS: PAPAL & ROYAL KNIGHTS
- RoundUp
- Roundup Found in All Urine Samples Tested
- Roundup weed killer toxic killer
- Royal British Family German Jews of illuminati
- Royal Prince Alfred Hospital Foundation fraud
- Royal Rothschild bloodline of demons
- RSPCA Australia NSW Yagoona 2011 finance report
- RSPCA £115m… isn't enough to rescue a tortured dog?
- RSPCA ‘Freedom Food’ pigs gassed to fall into line with cruel meat industry
- RSPCA boss Dr Peter Wright – accused of animal cruelty
- RSPCA charity scams
- RSPCA corruption
- RSPCA cruelty
- RSPCA did nothing let Patrice Raymond starve dog to death
- RSPCA do NOT protect animals they KILL them
- RSPCA exposed
- RSPCA free range scams
- RSPCA in bed with the Animal abusers
- RSPCA is a Corporation
- RSPCA is a Corporation not a charity
- RSPCA kill everything they rescue
- RSPCA kill not save
- RSPCA kill rate data for 2012-13 all states
- RSPCA kill rescued animals
- RSPCA killed 1160 animals out of 1200 dumped on Christmas / New Year
- RSPCA killed 43 cattle – RUTH DOWNEY
- RSPCA kills needlessly
- RSPCA neglect calls as more animals keep dying.
- RSPCA neglect horse cruelty for years
- RSPCA NSW 2011 finance report
- RSPCA NSW 2014 Financial report total $94.5 million
- RSPCA promotes meat industry and live exports
- RSPCA refuses TV debate
- RSPCA responsible for the death of my elderly cat
- RSPCA scams
- RSPCA scandals
- RSPCA shocking admission
- RSPCA Shot Ruth Downey's Nursing Cows leaving the Calves to starve
- RSPCA staff been paid an extra $14 dollars a day if they “euthanise” an animal
- RSPCA trustees 'broke charity rules' again
- RSPCA unkind to animals
- RSPCA won't drop pig abusers
- RT “Accidentally” Busts Assange and Wikileaks as CIA Front
- RT.com
- Rudozem Street Dog Rescue
- Rule of Law
- Run from the cure – hemp medicine
- Rupert Murdoch ashamed of his Jewish origins
- Rupert Murdoch Jewish Owner Of Fox News Behind Blackmail Vaccination Push In Australia
- RUPERT MURDOCH'S JEWISH MOTHER. SCHOOLING. ZIONIST ROOTS. ISRAEL. ADL. WTC. 911. ETC.
- Rupert Murdoch's Jewish origins
- Rupert Murdock iTV hacking
- Rush Limbaugh
- Russell Brand the zionist
- russia
- Russia Issues International Arrest Warrant For Rothschild Henchman & Leftist Savior George Soros!
- Russia Targets criminal Jewish Tycoons
- Russia Today Declares 9/11 Was An Inside Job!
- Russia wins
- Russian Jews and Chernobyl false flag attack
- Russian Jews – Natural Born Killers
- Russian Mafia are Jewish
- Russian Military Arms Expo 2013
- Russian Mink fur farm
- Rutgers students face “bias” probe for flyers criticizing Israeli home demolitions
- Saint Francis
- Saint Peter's Square
- salvation
- SALVATION ARMY CONVERTS TO ZIONISM
- Sam Childers – Machine Gun Preacher
- Sam iliadis the council scumbag
- Same Crisis Actor Interviewed at LAX Shooting and 9/11 Twin Towers
- Sami Tolvanen conman
- san francisco
- Sanctions
- Sandy Hook Actors Laura Phelps Exposed as Jennifer Sexton Greenberg
- Sandy Hook Redux: Obama officials confirm that it was a drill and no children died
- Sandy Hook School Shooting hoax
- Santa Ana Police raided a pot dispensary and then ate the edibles.
- Santa Barbara Shooting Hoax Blown WIDE OPEN:
- Santos Bonacci interview after court 29/01/14
- Santos Bonacci outside court Melbourne Australia April 1st. 2014
- SARTRE Commentary
- Satan & 58 dollar scam (Benny Hinn & Mike Murdock)
- Satan At The Wailing Wall
- Satan's chosen people
- Satanic Freemasons
- satanic jews
- Satanic Jews Vandalized Catholic School
- Satanic Ritual Sacrifice On An International Scale
- Satanic Rothschild
- Satanic Vatican Jews
- Satanic Vatican Jews – The illuminati hierarchy
- satanic zionist freemason 2012 Olympics
- satanism
- Satanism in the Vatican
- Satellites have balloons
- satire
- Saudi Arabia Jews supply Anti-Aircraft Missiles to Mercenaries (CIA Mi6 SAS Mossad Al-Qaeda) in Syria
- Saudi Royal Family are Jewish! King and Prince are all Jews
- saudi-arabia
- savagely beat them'
- Save your seeds before Monsanto controls them.
- scams
- Schapelle Corby an innocent woman sacrificed by Australian Government
- Science
- Science & nature
- Scientists now they admit sunlight can prevent skin cancer
- Scientists reveal Jewish history's forgotten Turkish roots
- Scientists reveal Jewish historys forgotten Turkish roots
- SCIENTOLOGY Child Labour Camp in Australia 2012
- SCOTLAND THE LAND OF THE GREEKS
- SCOTLANDS ELITE PAEDOFILE RING . HOLLIE GREIG
- Sean Dix
- Seasonal adjustment
- SeaWorld jews
- SeaWorld slavery system
- Secret CIA Human Experiments in the United States: MK-ULTRA Mind Control
- Secret Service killed JFK here's video to prove it
- Secret Service party Cocaine and Prostitutes
- Secret Sex Life of the Jews
- Secret Underground Highway Systems Spanning the Entire USA
- Secret War In Space – NASA Coverup
- Security News
- sedition
- Senate Bill S510
- Senate Bill S510 Makes it illegal to Grow
- Senate Terrorism Subcommittee
- Senior British rabbi filmed telling alleged child abuse victim not to go to the police
- Sept. 2012
- Serbia
- SES Volunteer saves accident victim
- Sevim Dagdelen
- Sex for Secrets
- Sex offender register 'will protect kids'
- Sex Slaves – Israel/Palestine
- Sex Slaves – Italy
- SEX SLAVES IN ISRAEL
- Sex Trafficking Inside the UN With Ties to the U.S.A State Department
- Seymour Park Moss Vale dog park
- sgs
- SGT. CHARLES L. JONES
- Shadow Government Statistics
- Shakespeare had a hand in writing the Bible for the Jew World Order
- She had three layers of wire wrapped around her neck and one eye was blinded by someone
- She was dumped with tape on his mouth and broken legs and left to end in pain due to human!
- Shell's pedophile network
- SHOCKING SECRET HIDDEN BY FREEMASONS TO PROMOTE FAKE JEWS
- Shocking true case of Adam Greenwood’s battle with Bowral’s “Shady Bunch” protected by dodgy NSW Police cops & John Barilaro’s mates
- SHOCKING TRUTH ABOUT CEREAL EXPOSED
- shoebat.com is a Jewish website against muslims
- shooting
- shoppingsquare.com.au email spam
- Shortages of food means more fear and panic for the goyim
- Shows the depravity of the jewish USA military “detainees were RAPED”
- Shrimp: The Disgusting Truth
- Shut Up JEW – Goyim TV
- Sick claims by israelis on social media that photos of Palestinian boy’s brutalization were faked
- Sideviews
- Significance of the Papal Decree
- Silver Well Generator and Magnetic Stirrer Kit
- Simon Wright
- Simpsons did it again
- Sir Noël Peirce Coward homosexual
- Six Jewish Companies Control 96% of the World’s Media
- skanky jews sleazing down america
- Skin Cancer is not caused by the Sun
- Skin Cancer scams
- Slavery
- Slobodan Milošević
- Smarter Farming
- SMH poll about alternative medicine was rigged
- Snoop Dogg Against Vaccines
- Snowden is a CIA fraud
- Snowden israel puppet
- Snowden Psyop Hoax
- So Are All Jewish Leaders Criminally Insane?
- Social Media
- Social Services trafficking children and eating babies
- soetoro
- Somali rebels = CIA puppets
- Someone Threw Her Off The Roof Leaving Her Paralyzed And Drink Rain Water To Survive
- Sophia Stewart the 'Mother of the Matrix' drops the truth bomb: Facebook is a CIA database
- soros
- SOS – QUAKE ALERT – HAARP ON FULL POWER – Be Prepared
- Soul Pattinson Chemists own this coal mine
- Sour Sop Cancer Cure
- SOUTH AFRICAN JEWS MOVE TO WESTERN AUSTRALIA.
- South Korea animal cruelty
- South Korea dog meat trade
- Southern Highlands criminal Michael John Darby of Berrima Communications
- Southern Highlands daily chemtrails
- space
- Space based weapons
- SPACE IS SO FAKE
- Space Station hoax!
- Space Travel hoax
- Space Wars – Project Puma Punku
- Spamhaus.org claiming cyber criminals running this website
- spanish animal cruelty
- Spanish BullFighters are pure scum
- special programs in Israeli kindergarten
- Speech from The Hon Bill Shorten MP addressing the Zionist Federation of Australia
- Speech Jamming technology
- Spielberg's Holocaust Hoax
- spirit cooker Marina Abramovic
- Squirrel returns the favor
- sraeli Government started off as a terrorist organisation killing the British in Palestine
- St Patricks College dundas nsw
- Staged CNN Syria Interviews Faked By CIA MI6 Activist Danny
- staged event
- Staged Refugee Crisis by the Jews to bring in more Muslims into Europe
- Staging the news
- Stan Meyers water powered Buggy
- stargate technology
- state
- state department
- State of Victoria – Department of Justice ABN 32 790 228 959
- states
- Stay alert boys
- Stephen Glover the Sydney Gay Jew
- Stephen Lendman
- Steven D. Kelley – Underground City at the Getty Museum
- Steven Seagal Loves Putin and Might Become a Russian Citizen Because of Ukraine
- Steven Seagal: I believe a lot of these mass murders (with Guns) have been engineered
- Steven Seagal: Obama Jewish regime very good at controlling media
- STEVEN SPIELBERG boston bombing production
- stone used to build the temples in the ancient Greek city Selinunte
- StoneHenge hoax
- Stop eating Pork Bacon
- Stop Fracking for gas
- Stop vaccinating your children.
- Stop wolf pups from being gassed buried alive and killed with metal hooks
- Street Kids Murdered by Brazilian Police Ahead Of the World Cup 2014
- Studies Show Psilocybin Mushrooms Can Cure Anxiety Depression and Even Regrow Brain Cells
- Study of Jewish Population Reveals New Schizophrenia Mutation
- Study of Psychopathy among Jews
- subversion
- SUCCESSES OF THE OPPT COURTESSY NOTICES
- Suez Canal
- Suicide bombers were invented by the Jews.
- Suing the Government for Negligence: The Federal Tort Claims Act
- Sunglasses Cause Cancer
- SUNSHINE COAST FRACKING FILMS & FORUM
- Super Powers pretending to be enemies in the public eye to keep themselves in power.
- Super-Soldier "Rachel" (Black Goo)
- Superannuation is just another money scam by the Jews
- Supermarket meat
- suppressed energy secrets
- Surf Life Saving Australia has a lot to answer for
- Survey scams
- suspicious deaths and suicides with links to the Westminster Jewish paedophile network
- Swan Hill Police attack and attempt to kill an unarmed man for refusing to allow entry without a warrant and steal a baby without cause.
- Swastikas Hate Graffiti Found on Brooklyn Synagogue & Stores by Jews
- Sweden set to punish Israel’s Palestinian victims
- swing
- Swisse Men's Ultivite crap
- Sydney Abattoir closed after animal cruelty footage
- Sydney Australia exposed
- Sydney Festival 2012 celebrations
- Sydney Kings Cross Police Station was raided because they were protecting a pedophile ring
- Sydney Martin Place CBD siege inquest: What role did ASIO play?
- Sydney siege inquest: What role did ASIO play?
- Synagogue of Satan Jewish Ritual Murder MASSONERIA talmud kabbalah 11_24
- Synthetic Forests. GE trees
- Syria
- Syria – The CIA and NATO Exposed
- SYRIA civil unrest by CIA
- Syria News
- Syria under attack by Jewish World Order
- syrian army
- Syrian Electronic Army = CIA
- Syrian families shot dead by CIA Mossad snipers
- Syrian Girl – Why Al Qaeda is Al CIAda
- Syrian Jews want Assad dead
- Syrian people want the Jewish Terrorists posing as rebels to leave
- Syrian Women confronts the network and calls them Al Jew-zeera
- Syrians Stay to Keep Warm in Tents While Obama Sends Warm Clothing for Al Qaeda
- Systematic Israeli State Terror
- taliban
- Taliban became bad guys when they started burning the Jewish Drug Lords crops in 2001
- Talmud Style
- Talmud Torah Quotes
- Talmudic Jews – The Children of Satan
- Taman Safari Indonesia Bogor animal cruelty
- taser resistant outfit
- Taurine an ingredient in Red Bull originally came from bulls.
- tax
- Tax cuts and subsidies for the zionist industries and corporations
- Tax Hero: Tommy Cryer Passes at 62
- Tax Payers fund Jewish Government Organised Crime
- taxes
- taxpayer
- tcgindustrial.com.au exposed!
- Tech Gadgets
- Tech News and Gadgets
- Techrific Australia – Reputable? not a chance!
- Teenage painter praised for extraordindary talent.
- Tel Aviv trumps Jew York to be named world's best gay city
- Telstra/telecom/bigpond tells family internet fault would take 14 years to be seen to
- Ten Years on a Chain: Rescued Dog's Happy Ending
- tephen lendman
- terror
- terror wars
- Terrorism is created by the Jews
- Terrorism Isn’t Real
- terrorist
- Terrorist “Jewish Defence League” Attack Supporters of Anti-Jew Comedian Dieudonné in Paris
- Terrorist group crimesagainstfathers.com
- terry kenney
- TESLA'S PURPLE ENERGY PLATES
- Texas Town Fires Police Dept. Hires Private Citizens For Security — Guess What Happened to Crime?
- Texe Marrs Hunts Jews and other Devils
- TGC Industrial scams
- Thailand Dog Meat Trade
- ThanksGiving just another Kosher fairy-tale for the sheep
- THC (marijuana) Helps Cure Cancer Says Harvard Study
- The 13 illuminati Satanic Jewish bloodlines
- The 13 Most Evil U.S.A Government Experiments on Humans
- The 4000 year old Ancient Greek Minoan Aqueducts.
- The 50 Most Influential Jews – Not a single humanist on the list
- The 528 Hz Frequency
- The 911 Rockefeller ritual in 1967
- the 9th circle ritual cult of jews
- The Abandoned Dog
- The ADL was founded by Pedophiles
- The Al Jazeera & Israeli Deception
- The Ancient Greeks Invented the Hanukkah Menorah
- The Ancient Name for Scotland has a Greek Connection
- The Animal Rights and Rescue Group (ARRG)
- the anti-Semitism trick
- The AntiChrist
- The ANZAC lies
- the art of Jewish false flag attacks to start wars
- The Australian carbon tax will be paid to the United Nations
- THE AUSTRALIAN ELECTION WAS A FRAUD
- The Australian Tax Office admit “not a legal entity”
- The Australian who helped create Israel
- The “Jews” Are Not Jews But Are Khazarians
- The ‘Free Syrian Army’ is a CIA-MI6 intel op
- The Baruch Plan for Jew World Government
- The Benefits of Hydrogen Peroxide and it’s Many Uses
- The Bible and its true meanings
- The Bible's oldest text teachings came from the Greeks not from Hebrew
- The Big Bang Theory star Mayim Bialik donates to Jewish Terrorists
- The big picture: Projection screen basics
- The Birth of the Cabal / Zionism
- The Black/African Holocaust 100 million killed by the Jews
- The Bohemian Grove
- The Book of Codes THE SECRET IS OUT
- The Book of Hebrews does not contain the word Jew.
- The Book of Maklumat
- The British and American Deception 1 – From Iraq to Iran
- THE BRITISH ARE USING GURKHAS IN LIBYA TO TERRORIZE LIBYANS
- THE BRITISH MONARCHY AND THE COMMITTEE OF 300 illuminati members exposed
- The British Royal Family of fakes
- The British Royals NAZI Jew bloodline
- The Budget scam
- The Bundy Bloodline – Families in the world who are allied with the Illuminati
- The Canadian army showing off their epic skills again
- The cancer industry's war on cancer cures
- The Cancer scam
- The Car that Runs on Water: Release to The People October 2013 — NOW!
- The CDC has been manipulating ICD codes on death certificates to conceal the fact that covid vaccines are a common cause of death
- The CFR and the RIIA Jewish roots
- The Child-Rape Assembly Line
- the Chinese pig that escaped slaughter
- The CIA – Criminal Israel Agency
- The CIA throwing unwanted CIA agents under the bus again
- The Committee of 300 governs the world via a three city state empire
- The Commonwealth Bank financial planner scam.
- The Corporation — Commonwealth of Australia
- The Corporation — Part 1 Corruption in Australia
- The Coverup of Zionist Jewish Organized Crime!
- The Coverup of Zionist Organized Crime!
- The COVID-19 Vaccine Program Violates the Nuremberg Code
- The Crimes of Israel – Eustace Mullins
- The crimes of the Nazis in Greece: Part two
- The criminal Jewish system
- The CrossRoads Group
- The CrossRoads Group in Moss Val
- The CrossRoads Group Moss Vale scams
- The Crying Bull
- The Dalai Lama – fraud
- The Dalai Lama – killer of Tibetans
- the day Australia died
- The DC Sniper Another Government False Flag
- The deliberate manipulation of our food system
- The dentistry holocaust: How America has been mercury poisoned by an industry in denial
- The Destiny Of America
- The Diary of Anne Frank is a Fraud
- the dog that been shot and buried and lived
- The Dunblane School Massacre That Changed Gun Law in Britain
- The Early History of the UCC
- The Early History of the uniform commercial code
- The Edomites – todays Jews
- The Elite Are Concerned With "The Massive Global Political Awakening"
- The Eupalinus Tunnel located on the Greek island of Samos
- The Euro & satanic symbolism
- The Europian Union = UN = Bilderberg group = Nights of Malta = Satanic Vatican Jesuits
- The Expulsion of Jews Throughout History
- the failing Holden Car industry
- the fake drug war
- The father of Elon Musk Who Fathered A Baby With His Stepdaughter
- The FBI's Assembly-Line Provocateurs
- The FDA And The Drug Companies Are in Bed Together
- The Fed's Pipeline To Israel
- The first Jesuits were Jews
- The First Nosejob In Modern Human History
- The Forensic Evidence Against The "Holocaust"
- The Forgotten Jewish Pirates of Jamaica
- The Fossil Fuel hoax
- The Gadhima Hindu ritual sacrifice
- The Gambinos… Jewish First Family of Crime
- The Genocide of 15+ Million Germans by the Jews
- The Gentle Barn Foundation is home to over 130 animals rescued from abuse neglect and slaughter.
- The Gift of Prophecy
- The Golden Ratio (Φ = 1.61803) in the dimensions of the Parthenon
- The Good Old Days
- The Government sells many of the 700000 kids that go missing each year – THAY ARE NOW SEX SLAVES FOR THE ELITE!
- The Greek 'Tessarakonteres' – one of the largest human-powered vessels in history.
- The Greek Connection of Ancient Druids
- The Hemp & Cannabis Foundation
- THE HIDDEN EMPIRE
- The Hidden Hazards of Microwave Cooking
- The Hidden History of the Incredibly Evil Khazarian Mafia known as the Jews
- The Hidden King of England
- The Hidden Reason To Attack Iran
- The History of the House of Rothschild
- The History Of The Illuminati
- The Holocaust & Genocide of the Semite Palestinian women and children
- The Holocaust hoax
- The Holocaust Hoax Exposed: Debunking the 20th Century's Biggest Lie
- The Holocaust is the biggest lie in the history
- The Holocaust Unveiled
- The Holodomor was a GENOCIDE committed by Jewish Bolsheviks
- The Holy Bible created by Zionists
- The Horrific New World Order Master Plan that has full UN approval
- The Hypocrisy of Buddhism
- The Idaho Department of Fish and Game killing wolves
- The illumati 2-the antichrist conspiracy
- The illuminati hierarchy
- The Illustrated Protocols Of Zion
- THE INTERNATIONAL JEW THE WORLD'S FOREMOST PROBLEM
- The International Jew The World's Foremost Problem.
- The Invention of the Jewish People
- The Invention of the Jewish People [Paperback]
- The IRA Jews
- THE IRISH CONNECTION TO THE GREEK TRIBE OF DAN
- The Irish Slave Trade – The Forgotten 'White' Slaves
- The Irish Tuatha Dé Dannan Connection to the Greek Tribe of Dan
- The Islam & Catholic Connection
- The Israeli “StopTheRockets from Gaza Myth”
- THE ISRAELI CEO OF TAVISTOCK
- the jesuit vatican new world order
- the jesuit vatican world order
- The Jew as World Parasite 1944
- the Jew Media octopus
- The Jew Who Rule America and the world
- The Jewish Attack On The Western World
- The Jewish Bilderberg club
- The Jewish Blood Diamond Trade exposed
- The Jewish Burqa
- The Jewish Child-Rape Assembly Line
- The Jewish Declaration of War on Nazi Germany
- The Jewish Ethnic Cleansing Of Europeans
- The Jewish hand behind Internet – Google Facebook Wikipedia Yahoo! MySpace eBay
- The Jewish HellFire Club – Descent Into Darkness
- The Jewish History Of The House Of Rothschild
- The Jewish Mafia rules the world
- the Jewish Myth
- The Jewish Pharaohs of Egypt
- The Jewish Pirates Who Ruled the Caribbean
- The Jewish Plague
- The Jewish propaganda campaigns against Muslims
- The Jewish Psychopath
- The Jewish religion FORBIDS Jews from being honest with non Jews!
- The Jewish roots of the Saudi Royal Family
- The Jewish Supremacy exposed
- The Jewish Synagogue of Satan
- The Jewish thought police
- The Jewish Vulcan salute
- The Jewish war on White Australia continues
- The Jewish way to kill a nation
- The Jewish World Order exposed
- THE JEWS DECLARE WAR ON GERMANY
- The Jews did the scalping not the indians
- The Jews had been in England in Anglo-Saxon times dealing in slaves
- The Jews have sucked baby-penis for 5000 years
- The Jews infiltrated Ancient Greece Rome and Egypt
- The Khazarian Conspiracy The Synangogue of Satan The Fake Jews
- The Khazarian Supremacy
- The Khazars (fake jews) are the New World Order
- The Khazars are the New World Order – A Jewish Defector Warned America
- The Khazars are TURKS!!
- The King David School of Zionism
- The Knight Templars were Crypto Jews
- The Knights of Malta
- The Largest In The World
- The Latin alphabet derives from Greek
- The Lead Vaccine Developer Comes Clean So She Can “Sleep At Night” – 44 girls are officially known to have died from these vaccines
- The Leading Edge Market Research Consultants
- The Lie Of The Genetic Jew
- The List OF 75 US Senators Who Voted To Let 30000 Drones Shoot Americans
- The Lizards and The Jews [full documentary]
- The majority of news they feed you on TV is NOT real.
- The Man in Charge of the World; The Great Rothschild Exposed
- The Man Who Discovered Cancer Cause Said This …. You Will Never Hear This From Your Doctor
- The Missing Secrets of Nikola Tesla & HAARP
- The Mohel
- The Monsanto Monopoly
- The moon is a electromagnetic plasma x-ray image reflection
- The moral treason of David Icke
- THE MOST ANTISEMITIC VIDEO EVER! The Truth About Jews
- The Most Empowered Children of The Future Will Be Deprogrammed and Deschooled
- The mushroom biologist talks about the antimicrobial properties of fungi
- The NASA Space Hoax Exposed
- The Nazi Zionist Connection
- THE NAZI ZIONIST PARTY
- The NAZI Zionist Party biggest secret
- THE NEPHILIM
- The Nikola Tesla Interview Hidden For 116 Years
- The NSA Reportedly Has Total Access To The Apple iPhone
- The NSW RSPCA have funds and assets of over $73million
- The Nuclear Threat from Israeli Submarines (The Samson Option)
- The Old Testament and New Testament was originally Greek
- The Old World Order Khazar Nazi Jews
- The oldest written text discovered in Greece 9000 years ago
- THE OMEGA AGENCY
- The One People – Australia
- The opiod epidemic was directly caused by the jewish Sackler family.
- The Original Crypto Jews
- THE OTHER ISRAEL [full documentary]
- The Pagan Origin Of Easter .. ishtar
- The Pagan Satanic origins of Holy Communion
- The Panhellenic Sun A Dazzling Emblem of Ancient Greek Unity
- The Phony (Mossad) Al Qaeda Cell in Palestine
- The Plague
- The Pope / Vatican is top of the tree for all UCC – Commercial law – Cannon law for which all barristers lawyers and judges worldwide must abide
- The Port Arthur Massacre – Australian false flag attack by jewish government
- The Power of RAW Cannabis Marijuana
- The Power Of The Rothschild State: The Hijacked Name Of Jew By The Khazar Banking Cartel.
- The president of the World Jewish Congress calls world leaders to pass laws that will put antisemites in prison
- The Problem is Civil Obedience
- The PROTOCOLS of the LEARNED ELDERS of ZION exposed
- The Queen of England Deals Extensively in $17 Trillion Depleted Uranium Trade
- The Real Hebrews – Jews
- The Real History of todays Fake Jews
- The Real History of todays White Jews
- the real holocaust
- The Real Iran that USA Doesnt Want You to See
- The Real Issue Of Jewish Genes
- The real Jewish History
- The Real Story of How Israel Was Created
- The real Terrorists that Governments dont want you to know
- The Reptilian Aliens and the Council of the 13 Jewish ‘Royal’ Families
- The revelation of Italian special forces in Libya fought on the side of the rebels Special Forces
- THE REVELATION OF THE PYRAMIDS
- The Rise of Putin and The Fall of Russian Jewish Oligarchs
- The role of Jews in the making of Hong Kong
- The Rothschild Bloodline
- THE ROTHSCHILD BLOODLINE 13 BLOODLINES OF THE ILLUMINATI
- THE ROTHSCHILD DYNASTY JESUIT CONTROLLED
- THE ROTHSCHILD OCTOPUS
- The RSPCA ravages the Australian population like a wolf let loose on a flock of sheep.
- The RSPCA-NSW bought “Tradewinds Park Pet Resort
- The Ruling Elite take DMT to contact entities
- The Russian Jewish History
- The Satanic Cult That Rules the World
- The Satanic Jewish origins of NASA
- The Satanic Jewish Origins of the Ku Klux Klan
- The Satanic Rothschild
- The Satanic truth behind the Star of David
- The Saudi Royal Family are Jewish
- The Sauds royal family are actually Jews
- The Secret Jewish Network – The Making Of A Sayanim
- The Secret War in Space and Airways
- The Shocking Backroom Image Behind Every U.S.A Vaccine
- The Shocking Truth About What’s Really In Vaccines
- The Six Million Jewish Holocaust Myth busted wide open
- The So Called British “Royal Family”: They are ALL Jews!
- The Star of David/Moloch
- the state of hip-hop nowadays
- The Story of Judah
- The Story of Tania Hossack an Australian MKULTRA Subject
- The strange tale of Aboriginal slave circus performers
- The Sumerians & The Annunaki
- The Supreme Court In The US Has Ruled That The Covid Pathogen Is Not A Vaccine
- The Synagogue of Satan [Paperback]
- The Terrible Swedish Jew Killed a Million Germans
- The Third Reich Jews
- THE TONY BLAIR SCANDAL
- The translations from Greek to Arabic were not done by Muslims
- The Transvestite Congress
- The True Hebrews
- The true horrors of pet food revealed
- The Truth About Abraham Lincoln and his Rothschild family blood
- The Truth About Skin Cancer It Is NOT Caused By The Sun
- The truth about the Jews and the Third Reich
- The Truth About the Rockefeller Drug Empire
- The TRUTH about the Sun The Sun Is Hollow & Interdimensional
- The Truth and Lies of 9/11
- The Truth Behind the "Star of David"
- The Truth on Organized Crime
- The Truth.
- THE TWELVE TRIBES OF ISRAEL TODAY
- The Ugly Truth about the Anti Defamation League (ADL)
- The Ugly Truth About the Anti-Defamation League
- The UN killing machine Eugenics Murding Cult That's Killed More People Than Hitler
- The United Kingdom has not had a True Monarch since 1852
- The United Nations Exposes Chemtrails: 100% PROOF We Are Being Poisoned
- THE VACCINATION HOAX
- The video that scares racist Jews
- The word JEW is a modern invention
- The World Has been Planned out
- The World is Waking Up to the New World Order
- The World needs to take back their Countries
- The World Tomorrow Julian Assange: President Rafael Correa
- The World Will Soon Know The Truth! Darius J Wright Interview
- The World’s Most Eco-Friendly Car: It’s Made Entirely From HEMP
- The Zionist ABC's slush fund coverage is found wanting
- The Zionist BUTCHERS Behind Communism – 135 million killed by the Jews
- The Zionist Facebook lie
- The Zionist History of Gangster Bankers In America
- The Zionist Invasion of American Indian Homelands
- The Zionist Mafia that runs the World
- The Zionist Politics of drug testing in sports
- The Zionist War Dragon
- The Zionist War on Nazi Germany
- The Zionist-Satanists Cabal
- The Zionists Have No Clothes – Part 1: The Debunked Middle-Eastern Roots
- theatre of sparta in greece
- thedigitaledge.com.au
- There are no Governments only Corporations
- There are plenty of us Jewish Aborigines
- THERE COMES A ROCKET FROM GAZA ?!
- There Is No Hell Fire; Adam & Eve Not Real ––– Pope Francis Exposes
- These four Ministers stood up against live animal exports
- These Maps Prove Russian Airstrikes Aren’t Actually Targeting ISIS
- These Women Are Fighting Al-Qaeda CIA Mi6 SAS Mossad In Syria
- Thessalonians 2:14-16 – A Severe Accusation about "the Jews"
- They Bought all of Russia for $20 Million financed by NY Jews.
- They Sold The House Locked 2 Dogs Inside With Nothing To Eat And Starved For Months
- THIS 12 YEAR OLD KID HAS BIGGER BALLS THAN YOU
- This 1933 Jewish event was called "The Romance of a People.”
- This is Frankenwolf
- This is how Israel treats their own citizens who are opposed to the genocide
- This is how the jews entertain themselves.. just like they did in the Roman Jewish Colosseum
- This is how the Jews play both sides of the coin
- This is Randy Weaver of Ruby Ridge
- This is what the Jew World Order creates
- This is why Cannabis is illegal
- This is why people hate the racist Jews
- This Old House
- Thomas Edison the Evil Khazar Jew
- Thomas Edison the Jewish Fraud
- THOMAS JEFFERSON TOOK HIS OATH ON A QUR'AN
- Thomas Paine
- Thousands of Christians banned by Israel from entering Bethlehem for Christmas
- Threats emerge over Jewish engagement party in Melbourne’s inner southwest
- Three Israelis indicted for importing prostitutes from Ukraine
- Three Reasons we are in Afghanistan
- Tibetan slaves already freed in 1959 by Mao
- Tila Tequila's Brain Aneurysm After Exposing the Illuminati on The Internet
- Tim Flannery's fraud predictions about climate change for the ALP
- Tim Mathieson is gay
- Times
- Tired of Facebook (JewBook) banning you for spreading the truth – try Worldtruth.org
- Titanic deliberately sunk by JP Morgan
- Titanic sinking – No lives lost
- Titanic sunk by JP Morgan
- TOM HANKS ACCUSED OF BUYING 13-YEAR-OLD GIRL FROM HER FATHER AND RAPED HER
- Tom Hanks pedo island
- Tom Tancredo
- Tony Abbott government failed to declare six company directorships in his first year in the upper house alone
- Tony Abbott is just another criminal Jew
- Tony Abbott linked to Catholic priest Paedophile
- Too Smart To Be A Cop?
- Top 10
- top 10 breakfast cereals most likely to contain Monsanto's GMO corn
- Top 10 Important Events of Ancient Greece
- Top 10 Mysterious Police Cases Solved By Psychics
- Top 10 Zionist Lies
- Top Doctors Reveal Vaccines Turn Our Immune System Against Us
- Top Gear Car show's wheels are falling off
- Top Israeli scientist says Ashkenazi Jews came from Khazaria not Palestine
- Top Rabbi Exposes Jewish Racism!
- Top scientist resigns from post – admits Global Warming is a scam
- Top Scientist Two Time Nobel Prize Winner: ‘Most Cancer Research is Largely a Fraud’
- TopGen Energy
- Tory Councillor Caught Trying to Have Sex With an 11 Year Old
- Total Election Fraud Against Ron Paul Documented!
- Totalcontrol.com.au exposed
- Toxic Flouride May be More Prevalent in Your Food than in Your Water
- TOXINS FOUND IN MONSANTO CROPS ARE DESTROYING YOUR RED BLOOD CELLS
- Toxins in Our Blood
- Traits of a Whistleblower – by the Jew World Order
- Transportation
- treason
- TREASURY CORP OF VICTORIA
- Tree Hugger
- Tribute paid to police dogs killed in action
- tricycle
- Tristan Tottenham and Kaye Wilson-Tottenham animal cruelty
- TROPHY HUNTING AND CHILD ABUSE EXPOSED
- Troy Gentry of the country music duo Montgomery Gentry slaughters tame bear
- trucks
- true activist
- True Australian Heroes protest against criminal Jewish Governments
- True Jews persecuted by todays fake Jews for centuries
- True Muslims Sunni and Shiites are against Terrorism Wahhabi are fake Islam!
- True Prince of Wales
- Trump assassination hoax
- Trump to jail Americans for criticism of Jews
- Truth about Libya – lies of the Media
- Truth about Weed Hemp Marijuana
- Truth behind the Jewish Star of David – Star of Moloch
- Truth Hurts CNN! Feed Drops Just as US Soldier Tells Why He Supports Ron Paul
- tsunami
- TTP
- Tuffy – a dog who refused to be beaten by cruelty
- Tunisia animal cruelty
- Turkey animal cruelty
- Turkey is the true origin of the so called Jew
- Turkey is where the Devil settled
- Turkey live export animal cruelty
- Turkey will be the new headquarters for the New World Order
- Turkish Ottoman British Jews in Gaza war 1917
- Turkish secret agents responsible for forest arsons in Greece!
- Turkish Tanks keep shelling Homes after UN deadline passes as 1k people die in 8 days
- Turmeric for Dogs and Cats
- Turmeric for Pets and animals
- Turning Plastic back into petroleum
- Turns out that when the jews pick a fight with someone other than women and malnourished 6-year-olds they get their fucking ass beat
- TWIN TOWERS SECURITY OWNED BY ISRAEL!!
- Twinings Tea Australia supports the RSPCA how sad
- Twitter censors Christians
- Two Austrian politicians face punishment for telling the truth over facebook posts
- Two Jews caught stealing human eggs in Romania
- Two more babies stricken with herpes at Jewish oral blood sucking circumcision
- Two Police Dogs Die After Cop Forgets Them in Truck
- Two Reporters Fired by Fox News for Revealing Health Dangers in Milk
- Two USA states ban chemtrails
- U.N. Report Advocates Teaching Masturbation to 5-Year-Olds
- U.N.: Dozens of Muslims massacred by Buddhists in Burma
- U.S Income Tax is a fraud
- U.S. Ambassador Killing was an Inside Job!
- U.S. sanctions against Iran
- UBS Bankers sentenced to prison for rigging Forex market again
- UBS hit by $1.5 billion fine rigging Forex market
- UFO Contact – Former Canadian Defence Minister
- UFO escorted by Air Force Fighters
- UFO Nightvision Starwars Over The Planet Earth
- UFO sightings
- UFOs – Brian OLeary
- Ugly Truths About the Jewish Talmud
- UK aids Jewish group with taxpayer money
- UK News
- UK riots and US "flash mobs" being created by CIA NSA agencies?
- UK seeks end to Human Rights Act?
- UK ULEZ Camera surveillance
- UK war in Libya for oil contracts
- UK war vultures installed a cuckoo zionist identity'
- UK: 508 Dead and 297274 Injured Following COVID-19 Experimental Vaccines
- ukraine
- Ukraine activists fake clashes and fake blood
- Ukraine heroes
- Ukraine War – fake news
- Ukraine War footage is actually Beirut Lebanon
- UKRAINE: ZIONIST AMERICA’S NEW JEWISH COLONY
- Ukrainian beach club in Kyiv during the fake war
- UN Article: The Benefits to World Hunger
- UN claims Syrian CIA Mossad rebels used sarin gas
- UN corruption
- UN General Assembly
- UN Jews teach masturbation to 5 year olds
- UN peacekeeper Jews sexually abused hundreds of Haitian women & girls – report
- UN pedos in Israel
- UN Resolutions Against Israel 1955-1992
- UN Resolutions against Israel Vetoed by US from September 1972 to May 1990
- UN supplied insurgents with chemical weapons for massacre
- UN Wants World Tax To ‘Help The Poor’ cough cough!
- Uncategorized
- Understanding How Admiralty And Common Law Apply To You
- Understanding Parasitic Jews
- Understanding the Jewish Synagogue of Satan Zionism Talmudism Babylonian Cabbalism
- Undervaccinated children have better health
- Union Cycliste Internationale promote drug doping – EPO
- Unit 3 / 6 Barnett Court Morley 6062 Perth Western Australia
- united nations
- United States Apache attack helicopter following behind ISIS convoy into Syria from Iraq
- United States Department of State
- United States Secretary of the Treasury
- Unlawful Killing
- Unlawful Killing – Diana Princess of Wales and Dodi Fayed assassination by the Jews
- Unsealed flight logs show that Trump was on Epstein's private jet in 1997
- Urantia Book Online
- us
- US arming Syrian rebels with anti-aircraft missiles – report
- US flight attendant entertains passengers with comedy safety routine
- US Government ADMITS UFOs
- US Military H.A.A.R.P Facility In Exmouth Western Australia
- US Regime Change: “We initiate Terrorism to create Terrorists to invade countries and overthrow Governments”
- US$4.2 Billion
- US-Israel Relations
- USA & Israel are world’s two leading terrorist organizations
- USA – 03/22/2012
- USA admits Israel is arming and training terrorist groups in Iran
- USA Aid to Israel Jumps to $11 Million Dollars Per Day; Over $4 Billion Dollars A Year
- USA Arms Sales 2003 -2010
- USA Army singing the Israeli national anthem
- USA Backed FSA rebels Use Children to Behead Innocent Syrians
- USA bases in Australia
- USA Caught Evacuating ISIS Leaders in Iraq
- USA celebrities call for boycott of Israel
- USA funds israel $3.2 billion per year
- USA hacked 2196 Chinese networks
- USA heroes harassing killing puppies
- USA Intelligence Agencies confirm Israel did 911
- USA Jews invading middle east for control and wealth
- USA lawmakers forced to support Israel
- USA Military bases in Australia
- USA Military in Action
- USA Military is so good 90% kills are to civilians the rest is to the enemy and friendly fire
- USA NATO ISRAEL False Flag Attacks
- USA never ever landed on the moon
- USA News
- USA Shells devastate entire streets in eastern Ukrainian town
- USA soldier who throws puppies over cliffs
- USA Soldiers Raped Boys In Front Of Their Mothers
- USA spreading viruses through chemtrail rain
- USA spy drones may fly from Australia's Indian Ocean territory of Cocos Islands
- USA to Russia: Give Up or Swim in Our Sea of Syrian Blood
- USA UK Monarchy behind Fukushima radiation genocide
- USA warns Iran over threat to block oil route
- USA weapon test caused Haiti earthquake HAARP
- Using the Private Record of the Parties
- USS Cole truth
- VA News
- Vaccination MUST SEE! – The Hidden Truth – Australian Documentary
- Vaccinations are counterproductive
- Vaccinations linked to baby deaths
- Vaccine bombshell: Baby monkeys given standard doses of popular vaccines develop autism symptoms
- Vaccine Carnage In The ER – Australian Nurse speaks out
- Vaccine heart attack
- Vaccine Industry
- Vaccines
- VACCINES ARE DANGEROUS
- Vaccines do nothing
- Validation Diagrams – Police in Australia
- Vanuatu calls for action from UN on West Papua situation
- Vatican
- Vatican – CIA heart attack gun
- Vatican and the Knights of Malta
- Vatican Bank is the main shareholder in ‘Pietro Beretta’ arms
- Vatican Bank Organized Crime
- Vatican controls the CIA
- Vatican crimes
- Vatican criminal Jews
- Vatican is Practicing Child Sacrifice
- Vatican Jewish World Order exposed
- Vatican Jews are the main shareholder in ‘Pietro Beretta’ arms
- Vatican Prepares for Alien UFO Disclosure
- Vatican Secrets EXPOSED! Jordan Maxwell
- Vatican World Bank Whistleblower ***Exposes All***
- Vatican: Owner of world's biggest banks and top companies [Catholic Church Exposed]
- Vet News
- veteran employment
- veteran news
- Veterans Today
- Veterans Today disinformation Site
- victim of flu vaccine debacle receive payout from WA Government
- Victorian intensive care paramedics left accident victim to die
- Vietnam War fighting for opium
- Virginia TV Crew Fake Shooting – Gun Control Plot Confirmed
- Virologist Blows The Whistle On Hoax Pandemic
- Vitality4life BioChef Dehydrator
- Vitamin B17 kills cancer cells
- vitamin C supplements can prevent cancer
- Vitamin D Proven More Effective Than Both Anti-Viral Drugs and Vaccines At Preventing The Flu
- Vladimir Putin Vows to Defend Christianity Worldwide against the Jew World Order
- Vladimir Putin's Jewish blood
- Volvo power
- vote
- voter
- voters
- voting
- Voting fraud
- Wagners Pty Ltd
- wahhabi
- Wake up america
- Walid Shoebat CIA jewish disinfo website
- Walid Shoebat Former CIA Agent of the Muslim Brotherhood
- Wall Street Banks Secretly Build The World’s Largest Private Army
- Wall Street Jews financed Nazis 1920s+30s & Communist Russian Revolution 1917
- Wall Street Journal
- Walmart animal cruelty
- Walt Disney greatest deceptions of all time
- Want To Know How Vaccines Work? You Are In For A Surprise!
- War crimes and Westfield shopping
- War in Gaza = War Over Natural Gas
- WAR IS A RACKET by General Smedley Butler
- War is good for business
- War on Drugs is bogus
- WAR ON EUROPE! Jews Importing Millions Of 3rd World Migrants For The Final Genocide Of The White Race
- War on Terror is a war on civilians
- wariscrime
- warmakings
- wars
- Wars of Deception by the Jews
- WarZone
- Was Chile colonized by the ancient Greeks
- washington d.c.
- Washington Post
- WE ARE UNDER OCCULT ATTACK
- Wear A Mask Or Go To Jail During The 1918 Influenza Pandemic In California.
- Weather Manipulation Patents
- Weather Modification and Commodities Trading
- Web Of Trust – WOT not safe to use
- Web Of Trust are in the business of selling security seals for websites
- Web Of Trust criminals
- Web of trust internet scams
- Web of Trust mywot.com
- Web Of Trust scams
- Web of Trust Sued over Community Warnings
- Web of Trust WOT mywot Scam
- Web of Trust WOT scams
- Web Sheriff criminal Jews
- Web Sheriff Jews protecting their own
- Welcome to the Jew World Order
- Wesley Clark
- Western Australia
- Western Australia Police Force corruption
- Westfield Group Corruption
- Westfield group development
- Westfield Group israel link
- Westfield Group tax rorts
- Westfield in Greece's financial crisis
- Westfield Parramatta and the ALP
- Westfield Shopping Centre the israeli connection
- Westfields Parramatta corruption
- Westpac Banks scams
- What Ancient Greek Music Sounded Like
- What did Palestine look like in 1896 before Hitler created israel to nationalize the fake jews
- What do the Rothschilds and Schwab have in common?
- What does the name Israel mean?
- What got President John F. Kennedy murdered?
- What Happened To The 12 Tribes Of Israel
- What is called Italy was Great Greece
- what is in Coca Cola – coke
- What is Loxism?
- What Is Public Law 102-14
- What is The OPPT
- What is the true meaning of Zionism
- What is the true origins of Zionism
- What is the value of GREECE
- What Israels American bombs do to children
- What Masonic Clubs – Freemasons believe in
- What The Jews Did To Germany
- What the Jews did to the Germans
- What the Polish Jews did to the Germans
- What the Price of Gold Is Telling Us
- What To Do When Confronted by Police
- What Turkish Cuisine?
- What World-famous Men have said About the Jews
- What's in Your Flu Shot!
- whats in milk
- WhatsApp’s website hacked briefly by Jews posing as pro-Palestine protestors
- When False Flags dont Fly anymore PEOPLE ARE LEARNING THE TRUTH
- When Jews were kings (and opium lords) in Shanghai
- When you hack the Jewish Governments
- Where do Jews come from
- Whirlpool Broadband Forums
- WHISTLEBLOWER DR. ANDREAS NOACK renown Austrian chemist is dead just hours after speaking out found dead about the effects of the adjuvant Graphene oxide.
- Whistler detectable radar detectors
- Whistler radar detectors detectable
- Whistler Radar Detectors unsafe
- white fake jews
- white house
- White House blocking release of Monsanto-linked lobbyist’s email
- White House refuses to reveal ties with Monsanto
- WhiteHouse camera! action!
- Who created Wahhabism and the state of Jewish Saudi Arabia
- who funded Hitler
- Who Funded The Nazis? Adolph Rothschild
- who Hamas is working for.. yes you got it… israel.
- Who Is Esau-Edom
- Who is ISIS ? – Really
- Who is really behind Gun Control
- who promotes Zionist Unicef? Angelina Jolie
- Who runs the worlds Organized Crime
- Who said RSPCA was not a business?
- Why are Jew so smart?
- Why are the criminal Jews so hated
- Why Can't Americans See the Obvious Truth?
- Why Does George W. Bush Fly in Drug Smuggler Barry Seal’s Airplane?
- WHY DON'T 'ISLAMIC TERRORISTS' EVER ATTACK POLITICIANS?
- Why Is Supposedly Dead Sandy Hook Principal Seen at Boston Bombing Event?
- Why Jews Push Gay Marriage
- Why Marijuana Weed Pot is illegal
- Why most people may not wake up – The Sad Truth
- Why So Many Israeli Actors Playing Arabs?
- Why the Jews Are Hated
- why the jews are so hated
- Why the jews pose as muslim terrorists
- Why the Jews sacrifice babies and eat Gentile blood
- Why the super-rich get richer — and you don’t
- Why Vatican Rothschild Is Trying To Destroy The Dollar For Gold: Rothschild’s Handbook
- Wife
- Wikileaks
- Wikileaks Is A Rothschild Operation: Rothschilds Use Wikileaks To Wound Rival Bank. Julian Assange’s Bail Posted By Rothschilds’ Sister-in-law
- WIKILEAKS WORKING FOR ISRAEL
- Wikipedia is a blackmail extortion racket run by the Jews
- Will Holden get more bailouts from Australian Government
- William Greer
- Wind Farms Wind Power is not the answer
- Wingecarribee Council Corruption: worst council in NSW
- Wingecarribee Shire Councillors
- Winston Churchill
- WIRES Bowral – Rachel
- WIRES pathetic
- With the lie about bird flu
- Wolf Reintroduction Benefits Ecosystem
- Wollongong Mayor Tony Bevan ran child sex ring
- woman takes Flu vaccine now she cant walk forward
- Woman who MADE UP entire bestselling holocaust memoir is forced to pay back $22.5 million after her lies are revealed 17 years later … and she’s not even Jewish
- Woolworths bakery eew!
- Woolworths croissant medium 8pk taste like cardboard
- Woolworths not the fresh food people
- Work
- World Bank Whistleblower Karen Hudes Reveals How The Global Elite Jews Rule The World
- World Jewish Congress admits they’re behind every culturally ill that plagues society.
- World News
- World Order
- World Politics
- World truth
- world war
- World War 1 & World War 2 – the Jew wars
- World War 1 and the real truth
- World War II Never Ended for Germany – It remains occupied to this day
- World Zionism hijacking United Nations to wage wars
- World's biggest bank: Vatican Bank
- Worst Australian Police brutality Kings Cross
- WOT criminals
- WOT loses in court
- WOT mywot faces jail time
- WOT mywot is useless for internet security
- WOT mywot.com – G7W – David Raynard (Stadler) Ohio criminal
- WOT scams
- WW2 Holocoust was financed by Zionist Rothschild
- WW2 Jewish leaders
- WW2: Raping & Killing White Women & Children: Murder of German & Finnish innocents – 2 million women raped
- www.adelaidecartridge.com www.inkjetcity.com.au scams
- www.radars.com.au exposed
- XM.COM (ex-XEMarkets) — Forex Broker
- Yeshiva Rabbi School
- Yet another Jewish international organ trafficking ring exposed
- Yids rape kids
- Young woman burned alive in front children and police officers after being labeled a witch
- YOUR BIRTH CERTIFICATE IS A STOCK ON THE NYSE!
- Your Bottled Water Has 24500 Chemicals
- Your Garlic is Being Imported From China and it’s Filled with Bleach and Toxic Chemicals (Here’s How to Spot It!)
- Your Soul Is Owned By The Vatican
- Your tax money is used to traffic children
- youropinion.com.au just a scam
- Youtube banned Brother Nathaniel channel
- YouTube banning your videos – try TruTube
- Youtube censorship by Governments
- YouTube Policy on Hate Speech
- Youtube suppressing the truth by deleting videos and accounts
- YouTube suspends Prime Minister Tony Abbott's YouTube account
- Zapper by Don Croft…Sweet Orgone Energy for health
- Zbigniew brzezinski
- Zenithink ZT 280 C91 cheap and nasty
- Zionification of Islam
- Zionism and How They Control Us.
- Zionism and Judaism by Rabbi Yisroel Dovid Weiss
- Zionism and the Third Reich
- Zionist Apple Jews
- Zionist Avril Lavigne showing whom she serves
- Zionist Bankers & Media Control
- ZIONIST BANKERS WHO RUN THE WORLD
- Zionist Bono exposed as a complete fraud
- Zionist Council of Victoria
- Zionist Dalai Lama
- Zionist Dick Smith the disinformation King
- Zionist Elite Sports Industry promote drug doping
- Zionist Federation of Australia
- Zionist Government scams
- Zionist Hitler and his boss Rothchild
- Zionist Jews Caught Faking Al Qaeda ( Al CIA-da )
- Zionist Jews Communist Goals (1963)
- Zionist Jews loved to scalp and collect heads too
- Zionist Joe Ludwig loves animal cruelty
- Zionist Jon Faine of Radio 774 ABC Melbourne defending israel again
- Zionist mark zuckerberg lie
- Zionist Meat Industry is so cruel
- Zionist Mockery of Police And Military
- Zionist News
- Zionist Psychotronic Weapons
- Zionist Richard Pratt
- Zionist Saudi Royal Family Completely Exposed Must Watch
- Zionist trying to start World War III.
- Zionist war on Mali African Gold
- Zionists Behind Armenian Genocide Holocaust
- Zionists Control the Internet!
- Zionists Infiltrate The Tea Party
- Zionists to boost thought crime law
- Zionists tool of multiculturalism to demolish western civilization
- Zoosk Online Dating STOP!!! Dont be tricked into subscribing!!!
 Posted in
Posted in  Tags:
Tags: 
Web Stats
- 5
- 695,733
- 2,749
- 3,766,513
Covid19

Freemasons

Racist Rabbis
The Plague
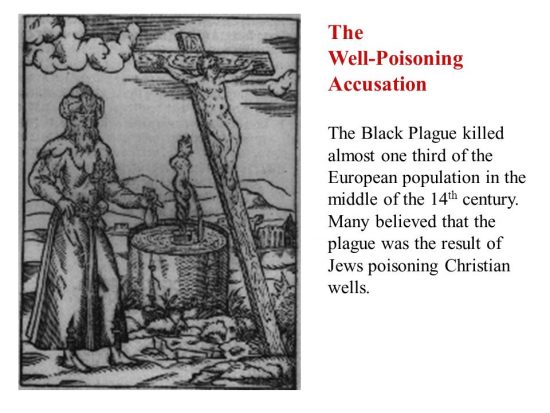
Terrorism

Satan is God
Anti Christ
About Jews
Pedophiles

Multiculturalism

NASA lies
Slavery

Drug Trade
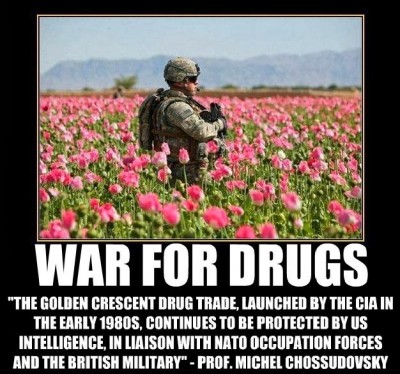
Fake News
Blood Suckers
China

Australia

In the Private
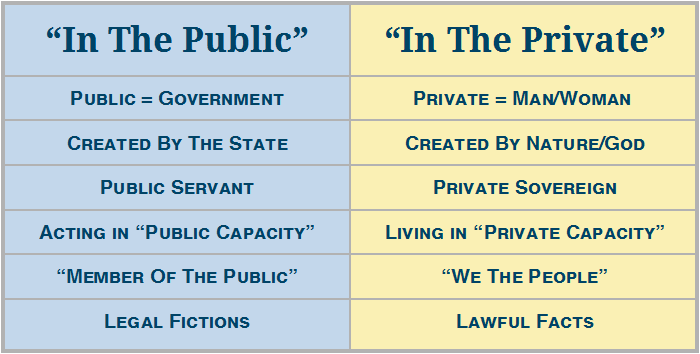
Court Room

Internet Trolls

Recent Comments
- jon on Fake Christian Real Sadistic Pedophile Pope Sits In Front of His Satanic Cross-Cabal Member Which is Why He is Promoted!
- DEATH TO "israel" on Jewish Artwork
- JESUS OUR SAVIOR on The World Will Soon Know The Truth! Darius J Wright Interview
- JESUS CHRIST THE SOLE MESSIAH on This 1933 Jewish event was called “The Romance of a People.”
- JESUS THE ONLY MESSIAH on Darius J Wright Interview – Soul Trap, Shape of Earth, Reincarnation, OBE, Dreams, Purpose of Life
- JESUS CHRIST OUR LORD on OBE Master Given UNFILTERED ACCESS to HUMANITY’S FUTURE on the OTHER SIDE! | Darius J. Wright
- JESUS THE ONLY MESSIAH on Christmas SANTA = SATAN
- No on New Rumble Partnership Promises a Caffeine-Infused Boost for Freedom of Speech
- Anonymous on New Rumble Partnership Promises a Caffeine-Infused Boost for Freedom of Speech
- Kyle on Is Global Warming being caused by HAARP and Related Weather War Technologies?
- death to israel on Antisemitism
- JESUS CHRIST THE ONLY MESSIAH on Antisemitism
- DEATH TO israel on Greece has been voted ‘Best Cuisine in the World’ for 2024/2025
- DEATH TO israel on Antisemitism
- NEVSKIGOROD on What Turkish Cuisine?
- James T. deVarennes on What Turkish Cuisine?
- DEATHTOZIONISTS on Israeli’s destroying Christian cemeteries again
- death to zionists on Antisemitism
- DEATHTOISRAEL on Deport All Jews
- DEATH TO ISRAEL on Israeli’s destroying Christian cemeteries again
- trumpistheac on Clif High – Next Level Woo
- CommuNaziJew on Islam is Judaism
- CommuNaziJew on Islam is Judaism
- CommuNaziJew on Islam is Judaism
- Ahmad on Islam is Judaism
- Cicero on Hamas Was Founded by Mossad israel
- Awake Goy on The NAZIS
- Dimitar on The NAZIS
- DEATHtoisrael on Shut Up JEW – Goyim TV
- EIL on Julia Gillard and Hillary Clinton playing Epstein Island dress ups
- Tammany Hall & The Alfred E. Smith Memorial Foundation Mafia Dinner | James Carner Official on THE TRUMPS FOUR GENERATIONS OF JEWISH TIES
- Classified Doc Leak, Israel’s Pending Iran Attack and Who the Real Terrorists Are - THE GOVERNMENT RAG INTELLIGENCE REPORT on The Talmudic Roots of Jewish Supremacism by Dr. David Duke
- Joachim Hagopian, Classified Doc Leak, Israel’s Pending Iran Attack and Who the Real Terrorists Are - James H. Fetzer on The Talmudic Roots of Jewish Supremacism by Dr. David Duke
- Awake Goy on Covid19 scamdemic
- Kill The Mall on Covid19 scamdemic
- DEATH TO "israel" on Governments control your weather and Climate
- William on What World-famous Men have said About the Jews
- DEATH TO israel on Crowd of Jews afraid of a rat
- Anne on Islam is Judaism
- Anne on Islam is Judaism
- Truther on Crowd of Jews afraid of a rat
- flatearthdave.tv on Ferdinand and Imelda Marcos vs the JWO
- Neil Ferguson: how did his Covid 19 statistics fool the world? – The Tree of Life on Dr. David Gorski named in medical conspiracy allegations complaint filed with Karmanos Cancer Center and Michigan Attorney General
- JESUS OF PALESTINE THE MESSIAH on Eric Clapton is blowing the whistle on Jewish supremacy around the world
- DEATH TO ISRAEL on The translations from Greek to Arabic were not done by Muslims.
- Bernays and Propaganda – Part 1 of 5 — February 06, 2021 on US Aggression In Syria – An Imperialist Blueprint
- JESUS CHRIST THE PALESTINIAN on Eric Clapton is blowing the whistle on Jewish supremacy around the world
- DEATHTOZIONISTS on Rabbi Alon Anava exposes the Jew World Order
- HEZBOLLAH RULES on Rabbi Alon Anava exposes the Jew World Order
- judentoten on Jewish teen girl: “I’m a Jew and our Bible says that you’re like animals”
- GENTILE MEANS GOOD on Rabbi Alon Anava exposes the Jew World Order
- TWOTIERKEIR on Jew gets kicked in the ass
- TOTENJUDEN on Jewess attacks man, then cries wolf when man defends himself
- zionistTERMINATOR on The deliberate manipulation of our food system
- TERMINATOR on The Gift of Prophecy
- Jb on Jesus was born in Bethlehem of Galilee not Jerusalem
- SIXMILLION on The deliberate manipulation of our food system
- heatler on Climate Change Hoax
- Jose G on WAR ON EUROPE! Jews Importing Millions Of 3rd World Migrants For The Final Genocide Of The White Race
- Jose G on WAR ON EUROPE! Jews Importing Millions Of 3rd World Migrants For The Final Genocide Of The White Race
- Awake Goy on Covid19 scamdemic
- judenraus on What do the Rothschilds and Schwab have in common?
- judenraus on Rabbi admits the Holocaust is a Myth
- NMNV on Islam is Judaism
- mak on Islam is Judaism
- endisrael on Psychopathy and Jews
- Don on ‘I Was Raped By The CIA Medics’ Says Black-Site Survivor
- KILL THE ROTHSCHILD on What do the Rothschilds and Schwab have in common?
- “People are arguing whether Mel Gibson’s “Passion of the Christ” is anti-semitic. Well, whether it is or it isn’t, it doesn’t matter! – BIG BROTHER in the 21. Century on Blakeney’s ‘Blood Libel’ Against Germany
- Awake Goy on Hebrew is Greek
- JP on Hebrew is Greek
- sluggo on First Holocaust museum to be inaugurated in Oporto, Portugal
- ANIHILATEISRAEL on Roseanne Barr exposing the Holocaust
- ERASEISRAEL on Communist Dictum:- “Accuse the enemy of those crimes you are guilty of”
- ADOLF on Psychopathy and Jews
- Awake Goy on If Israel is guilty of GENOCIDE, and much hard evidence now proves they are, then so is the United States.
- JP on If Israel is guilty of GENOCIDE, and much hard evidence now proves they are, then so is the United States.
- JP on If Israel is guilty of GENOCIDE, and much hard evidence now proves they are, then so is the United States.
- Cat on Jewish Holocaust Hoax
- Ireland Roth on Study: Genetically Engineered HIV Vaccine INCREASED Risk of HIV Infection
- Fiona Conway on ESPN Analyst Rob Parker: Redskins Quarterback Robert Griffin III Not Really Black Since He Might Be Republican
- JESUSISBACK on Rabbi admits the Holocaust is a Myth
- JESUS CHRIST RULES on Rabbi admits the Holocaust is a Myth
- Anonymous on Islam is Judaism
- TOTENJUDEN on World Jewish Congress admits they’re behind every culturally ill that plagues society.
- TOTENJUDEN on The Holy Bible created by Zionists
- BILBO on Five Lessons For Russia To Learn From Ukraine’s Sneak Attack Against Kursk Region
- WESTANDWITHRUSSIAANDPALESTINE on Navy SEAL Commander Says 100 Trainees Quit After Mandated Covid Shot Killed Their Comrade
- fuckijones on UK Politicians Call For Nationalists To Have Their ‘Throats Cut’ & The Arrest Of Tommy Robinson
- FUCK YOU TwoTierKeir on UK Politicians Call For Nationalists To Have Their ‘Throats Cut’ & The Arrest Of Tommy Robinson
- ADHIT on World Jewish Congress admits they’re behind every culturally ill that plagues society.
- BIDENTHEPEDO on Elijah Wood Claims Hollywood Is Gripped By A Powerful Paedophile Ring
- FUCKYOUANDREWS on One of Australia’s Loudest Pro-Vaccine Voices and Host of ‘Anti-Vaxxers Exposed’ Documentary, Dies After Battle with Cancer
- Awake Goy on Fast Food Workers Confess What Foods You Should NOT Order!
- TheFool on The Jews infiltrated and destroyed Ancient Greece Rome and Egypt
- Jim on Fast Food Workers Confess What Foods You Should NOT Order!
- Jim on Jews kill 66+ Million Russian christians – the real holocaust
- Bible reader on Jesus was born in Bethlehem of Galilee not Jerusalem
- Awake Goy on US Will ‘Certainly’ Defend Israel If Attacked By Iran In Wake Of Haniyeh Murder By Israel
- Anonymous on US Will ‘Certainly’ Defend Israel If Attacked By Iran In Wake Of Haniyeh Murder By Israel
- Anonymous on Why Germany Invaded Poland-How WW 1 & WW 2 Started and America was Dragged in Both Times
- Messenger Charles on August 2 – Israel is Digging Its Own Grave
Tags
- "Chemtrails" — How They Affect You and What You Can Do
- "Royal Family": They are ALL Jews!
- "Trump Supporter Riot" Was STAGED by the D.C. Police!
- $1m grant for Malaga RSPCA
- $7.5m grant for Yagoona RSPCA
- 'Gender-bending' chemicals found to 'feminise' boys
- 'USA Hiding Real Debt Worse Than Greece' Economic Collapse is HERE
- 000 To Give You just The Flu? … sure
- 10 Chemical Weapons Attacks Washington Jews Don't Want You to Talk About
- 10 Jewish false flags operations that shaped our world
- 10 Taxpayer Handouts to the Jewish Super Rich
- 100 hidden GMO ingredients
- 100 Indonesian boys in Australian prisons
- 100 of the World's top minds killed by the Jews
- 100 YEARS OF JEWISH PLOTS AGAINST THE USA
- 100 years of Jewish War lies
- 100000 Gather for Talmud Study Celebration at MetLife Stadium
- 1000000 or more Jewish Satanist in USA
- 12 Tribes of israel
- 14000 U.S. Deaths Tied to Fukushima Reactor Disaster Fallout
- 15 million german killed by the Jews
- 15 yr-old Jew submits a ‘Holocaust denial’ report called Holohoax & gets an ‘A’
- 1933 chicago jewish cultural festival. Mock sacrifice to moloch.
- 1975 THE UNITED NATIONS PASSED A RESOLUTION DECLARING ZIONISM A FORM OF RACISM.. it was revoked by 1991
- 1996 port arthur massacre
- 2 AMERICAN CIA AGENTS CAUGHT IN SYRIA
- 200 million baby male chicks killed every year
- 2012 – NEWEST 9/11 DOCUMENTARY – PROOF 9/11 WAS AN INSIDE JOB
- 2012 ANNOUNCEMENT by Princess Kaoru Nakamaru Japan
- 250.000 people across Brazil have been forcefully removed from their homes for the World Cup.
- 2700 ARMORED VEHICLES PURCHASED FOR POLICE DEPARTMENTS BY DHS
- 3-D Holograms of “Holocaust Survivors” Now A Reality
- 4 British Mi6 Jihadists DEAD
- 4000 Israeli Employees in WTC Absent the Day of the 911 Attack
- 440hz Music – Conspiracy To Detune Us From Natural 432Hz Harmonics
- 46 Ways to Protect Yourself from Nuclear Radiation
- 5 Israeli agents waiting for 911 to happen
- 5 Stars Who Stood Up to Zionism + 5 Who Bowed Down to Cancel Culture
- 50 Jewish owned USA Hospitals overcharge by 1000 percent
- 6 Jewish Companies That Profit from the Police State
- 6 million Jews myth
- 6 Million Jews need funds 1915 – 1938 before Hitler
- 6 Months Passed Poor Dog Only Knew How to Drink Rain Water to Try to Live Now He Is Like a Dry Leaf
- 60 Lab Studies Now Confirm Cancer Link to a Vaccine You Probably Had as a Child
- 6000 Wolves Remain With No Help From Congress!!!
- 6000 year old inscription with Greek letters
- 7.2 million-Year-Old Pre-Human Fossil Suggests Mankind Arose in Europe NOT Africa
- 700.000 years old Skull discovered in Greek cave
- 78 Yr Old Brit Beat 'Incurable' Cancer By Changing Diet
- 7News : Policeman stood down over arrest
- 85 million indians killed by the British Jews
- 9 year old discusses the meaning of life and the universe
- 9/11 WTC Biggest Gold Heist in History: $300 Billion in Bars
- 90 Pounds Of Cocaine Found On Cargo Ship Owned By Jewish Anti-Drug Senator’s Family
- 911 classroom ritual with Bush
- 911 explosions before the plane hit tower!
- 911 Jewish Preparation for the WTC destruction
- 911 Kids Coloring Book
- 911 last man standing
- 911 not over yet
- 911 questions answered truthfully
- 911 security van
- 911 the money maker
- 911 the Zionist money maker
- 911 truth
- 911 video faked by mainstream media news networks
- 911 zionist attack
- 99.9% of human rights organizations are owned by the Jews to cover up their crimes
- A 6000 Year History Of The Jew World Order
- A BBC Documentary on Vanunu Exposes Who Controls the Media in America
- A Bengali refuses to fill petrol for Jews in UAE
- A Current Affair Zionist Programming
- A DINGO ATE MY BABY!! Marina Abramovic vs Lindy Chamberlain
- A faithful dog stays by dead friend
- A female humpback whale had become entangled in a spider web of crab traps and lines
- A globalist Jewish rat's nest amidst the rise of Asia
- a Jew destroyed all ancient artifacts in Sparta
- A last minute guide to the Bible
- A Libyan Girl's Message to Obama & NATO on Their Aggression on Libya
- A List Of Child Sex Offenders Inside The British Government
- A pilot who wrote a conspiracy theory book about 9/11 assassinated
- A POLISH CHURCH IN CANADA SAYS NO!!!
- A pop up vaccine clinic in Canada that is offering kids free ice cream in exchange for a vaccine
- A real Hebrew is a Negro
- A ROTHSCHILD SPEAKS OUT
- A stray dog as thin as a bat in the trash pile an angelic woman who take it home and cared with love
- A true hebrew is a Negro. Jews are an invention.
- A Very Bad Day for Al-Qaeda FSA CIA Terrorists in Syria
- A World Revolution Has Begun!
- Aaron Russo Speaks Out Against Evil Jewish Plans To Enslave Mankind
- ABC News Propaganda
- Aboriginal artists who’s art is killing it on social media
- ABOUT THE UNIVERSAL INTELLIGENT LIVING ORGANISM
- Abraham Lincoln and Jefferson Davis were the same Actor
- Abraham Lincoln the filthy Jew
- Academy formerly Xe – Blackwater USA and Blackwater Worldwide killing civillians
- Acidic Blood vs Alkaline Blood
- Actor Steven Seagal: We have to take this country back from the NAZI Jews
- Actors used to fake Media News
- Adelaide: Rights Lawyer Attacked by Murdoch Media
- ADHD is a prime example of a fictitious disease
- Adidas track pants stitching failures
- ADL = Jewish Defense League and other Criminal Zionist Groups in Government
- ADL rape and kill children
- ADL rape kids
- ADL terrorist group Slams “Jews Control Hollywood” Sketch From Academy Awards Ceremony
- Admiral tyres – cheap and nasty
- Adolf Hitler — Agent of Zionism and Freemasonry
- Adolf Hitler and his Jewish Masters
- Adolf Hitler and the Jewish Holocaust Hoax Exposed
- Adolf Hitler and the Jews
- Adolf Hitler died of old age
- Adolf Hitler frees Louis de Rothschild from Gestapo
- Adolf Hitler had 4 daughters.
- Adolf Hitler Rothschild
- adolf hitler was a rothschild
- Adolf Hitler was defamed by jewish lies
- Adolf Hitler Was Financed by the Federal Reserve and the Bank of England
- Adolf Hitler's British Royal Family
- Adolf Hitler's daughter Angela Merkel has her fathers mustache
- Adolf Hitlers daughter Angela Merkel
- Adolf Hitlers USA Jewish business partners
- Adolf Hitler The Gay Bully of The Past
- Adolph Hitler related to Rothschild
- Adriana Victoria Munoz
- Aerpro audio connectors
- Aerpro ISO to Pioneer pathetic
- Afganistan Cuba Vietnam war to control drugs
- Afghan teenager killed by Australian Soldiers guarding Australian Bankers poppy fields
- Afghan war exposed
- Afghanistan War to protect Jewish opium farms
- AFP Corruption & Airport Drug Syndication
- African Holocaust by the Jews continues
- African Slavery in America: Jewish-Made
- After Years Of Secrecy A Psychic Begins Solving Crimes
- Again the Zionist Media using actors to create false News
- Agenda 21
- AIJAC – Australian Jews defaming good people again for the Jew World Order
- AIPAC backwards spells CAPIA
- AIPAC Jews want to stage more terror attacks to start more wars
- AIPAC scum
- AIPAC Zionists – the Archenemy of the American Nation
- Air Force dumped remains of 274 troops in landfill
- airplane
- Al Franken Admits Being Warned To Avoid Twin Towers on 9/11 by Jewish Former Mayor of New York
- Al Gore Admits “They” are Spraying 90 Million Tons Per Day of Toxic Chemicals into the Atmosphere
- Al Jazeera news network infiltrated by zionist jews
- Al Qaeda CIA Agent Commando ‘Getting a Haircut’ Before Yemen Killings
- Al Qaeda Never Existed
- Al Qaeda Zionist CIA agents
- Alan Salerian
- Alaska Government meeting prayer was HAIL SATAN.
- Albert Einstein a Historical Jewish Fraud
- Alex Collier Andromedan Contactee – Full 1994 Interview
- Alex Jones
- ALEX JONES & THEIR AGENDA
- Alex Jones – "I Support Israel Its Their Land" Zionism
- Alex Jones Exposed!
- Alex Jones Linked To Zionism
- Alex Jones On CIA Payroll?
- Alex Jones Shuts David Icke Up On Rothschilds
- Ali Abunimah
- Alien Base for Giants Discovered in the Bucegi Mountains
- Alien factory and UFO in the Zeeman Crater
- Alien false flag attack coming – smoking gun.
- alien invasion
- alien looking glass technology
- Alien Message: “Do You Wish That We Show Up?”
- Aliens and UFOs with Bob Hickman Psychic-Medium
- All Crypto Currency are run by the Banks
- All Jews are Zionists
- ALL PICTURES OF THE SUN STARS PLANETS IN SPACE ARE FABRICATED
- All prostitutes wear a Burqua
- All serial killers are jewish
- All Tattooists to be Finger Printed Palm Printed & Photographed for Government Database
- All Wars Are Jewish Bankers Wars
- Allah – Moon God
- Allah is Satan
- Alleged radar detection HQ busted
- ALLIED STARS FILMS
- Allison Speerin
- Allopathic Medicine
- Almine gives a lecture at Avebury light centre
- Amalek
- Amaysim – cheap and congested network
- Amazing Health Benefits of Juicing Raw Cannabis
- Amazing Herb Kills 98% Of Cancer Cells In Just 16 Hours
- Amber Heard the zionist Fraud
- Amcor group
- America & Britain Killing for Opium
- America funded Hitler
- America Killing for Opium
- America wake up
- America was sold to five billionaires
- America's farmlands to be carpet-bombed with Vietnam-era Agent Orange
- AMERICA'S PRETEXT TO INVADE AFRICA: US Marines Dispatched to Five African Countries
- America's Youth Army fights for the Jewish Bankers
- America-Israel-UK cannot even win a war against third world countries
- America’s media is almost exclusively kosher
- American academic group boycotts Israeli universities
- American Cancer Society scams
- American Children Eating Rats to Live
- American Dollar
- American Drug War fraud
- American Flag
- American Jews invent enemies for their World Order
- AMERICAN JEWS With AR-15’s AND AK-47’s Surround Texas Mosque
- American military have made prison rape legal by calling it "Medicalized Rape."
- American Militia Commander Tells Congress They Are Running Out Of Time
- American NAZI Jews
- American news
- American News
- American Opium farms in Afganistan
- American State Nationals
- American Zionist Council known as the "Kenen Committee" called the American Israel Public Affairs Committee (or AIPAC)
- Americans are waking up to the Anti-Christ
- Americans Made a Pact With the Devil After 9/11/01
- Americas
- Amirah Droudis ASIO agent
- Amish community puppy mills – the dark side of religion.
- Amnesty International a zionist jewish front
- Amnesty International another charity scam
- Amnesty International: Another False Beacon charity sham
- Ampol's pedophile network
- An anti-semite is not someone who hates Jews; it is someone the Zionists hate.
- An Astronaut Losing His Head in the CGI on Board the Fake ISS
- An interview with an ex-Navy Seal
- Analysis Finds Monsanto’s GM Corn Nutritionally Dead Highly Toxic
- Anastasia Droudis ASIO agent
- ANC IS A COMMUNIST JEWISH FRONT
- Ancient Afghan treasures tour Australia
- Ancient Aliens
- Ancient Greek dialects in Italy
- Ancient Greek Pelike (4th Century BC) depicting a woman acrobat shooting an arrow with her feet
- Ancient Greek Pyramid predates Egypt.
- Ancient Greeks Discovered America Thousands of Years Ago
- Ancient Jewish History: Banking & Bankers
- Ancient Satanic Torah found in Turkey
- Ancient synagogue in Syria destroyed by the CIA syrian rebels
- And Desecrate Churches!
- and Micro Chips in The Swine Flu Vaccine
- And Restrain Children Without Parental Consent
- And Two Children
- Andrew Breitbart assassinated by the CIA
- Angela Merkel is Hitlers Daughter and a Rothschild
- Angela Merkel: Hitler’s Daughter- The Secret Stasi Files And Artificial Insemination
- Angelina Jolie the zionist
- Angelus
- Angora Rabbits SCREAM for life as their fur is RIPPED from their skin
- Anhar Kochneva
- Anhar Kotschnewa
- Animal Assistance League needs donations
- Animal cruelty
- Animal Cruelty Free Shop
- Animal rescue group SoCares takes on CESSNOCK City council
- Animal testing on cats & dogs is legal for Jewish Corporations
- Animal Testing on GM Foods not safe
- Animal Welfare in "Nazi Germany
- ANIMALS STILL SKINNED AND BOILED ALIVE IN CHINA AND STH KOREA
- ankara
- Ann Althouse
- Ann Bressington Member of the Legislative Council of South Australia warns Australians about Agenda 21
- Ann Wright
- Anne Frank Diary Fraud Finally Admitted
- Anne Heche Video
- Anonymous
- Anonymous = CIA
- Anonymous forces a CEO to fire a woman whistleblower
- Anonymous is CIA
- Anonymous Leaks Jewish Satanic Cult Member Names
- Anonymous Message to AIPAC (ANTI-ZIONIST)
- another false Article by the Jewish Zionist Media "The Age"
- Another Jewish Pedophile ring – sex rings for the jewish elite
- Another Jewish Pedophilia ring
- another jewish psyops. Jews cry wolf again.
- another of China's animal cruelty
- Another Whistleblower killed by the Jew World Order
- Anthology – The Grant Hunt/ Rothschild’s Company that has its corporate eyes on one of Australia’s most Iconic locations Jenolan Caves
- Anthony Randazzo
- Anti American protests exposed
- Anti Christian Dianne Feinstein
- Anti Defamation League – anti Semitic hoax
- Anti Defemation League – the wolf in sheeps clothing
- Anti Gravity free energy
- Anti Jew birds
- anti semite Israel Jews good at fighting against unarmed semite arab women and children
- Anti-Defamation League Award Dinner for President John F. Kennedy
- Anti-homeless studs
- Anti-Semites
- ANTIFA is JEWISH
- Antisemitism
- Anunnaki and Ancient Hidden Technology (MUST SEE)
- anzac day
- ANZAC Day (Zionist Jews memorial day)
- ANZAC Day – the truth
- Anzac sacrifice commemorated at dawn services
- ANZAC Zionist Day
- Apollo fake moon landing proof
- Apple Airpod detecting brain activity
- Apple Jews reject App That Tracks U.S. Drone Strikes
- Appliances Online Australia pathetic
- Arabs Are ‘Just Like Hitler’
- Aramaic has Greek origins
- Araucanians (Mapuche): Homeric Spartans who colonised Chile
- Archeologists find evidence that Egyptians ruled Israel BC
- Arctic has gained hundreds of miles of thick ice in the last 3 years
- Are Catholic elites practicing Black Mass Child Sacrifice?
- Are Councils legal
- Are New York Hospitals Hiding Herpes From Metzitzah B’Peh Circumcision Rite
- Are Your Children Playing With Lucifer's Testicles? | The Truth About Easter Eggs
- Area 51
- argument
- Arlec Australia china made crap
- Arlec Australia electrical timers
- Armed Citizen Militia Shows Up At Occupy Phoenix
- arms deal
- Army dumps hundreds of heroic war dogs
- Army scientists secretly sprayed St Louis with 'radioactive' particles for YEARS to test chemical warfare technology
- Arrested? do not submit to their verbal contract!
- Artemis Sorras Hellas FM 07-10-2012/PART 1
- Asher Moses
- Asher Moses continues to steal articles for Fairfax Media
- Asher Moses defames the competition in his fasle articles
- Asher Moses from Fairfax Media defames the competition in his fasle articles
- Asher Moses israel Zionist Jew
- Asher Moses sacked from Fairfax Media
- Asher Moses sacked from Fairfax Media and ACCAN
- Asher Moses the Fairfax criminal
- Asher Moses zionist criminal of Fairfax News
- Asher Moses zionist tabloid journalist for SMH
- Ashkenazi Jews descended from ancient Turkey: New research
- Ashkenazi Khazars Are Not The Jews of The Bible!
- AshkeNAZIS
- Asics gel 1110
- ASIO
- ASIO killing the innocent for the Zionist Bankers
- Ask University of Wisconsin to End Cruel Experiments on Cats!
- assad
- Assange and the illuminati jews
- assassination
- Assassinations By Induced Heart Attack And Cancer
- attack
- attack helicopters
- attack on iran
- attempted murder
- Attorney-General Greg Smith the paedophile
- Audit The RSPCA petition
- AusAID charity scams
- Auschwitz – the holocaust gas chamber lie
- Auschwitz camp lies
- AUSPOST New Berrima NSW
- AUSPOST owned by Jews
- Aussie Brendon O’Connell’s Ordeal with zionists
- Aussie Jews lash out at PM Abbott for saying ISIS jihadists Jews 'worse than Nazis'
- Aussie Trade Unionist Exposes 9/11 Cover-up
- Australia day
- Australia day or israeli day
- Australia demands Israel probe abuse of imported cattle
- Australia dumps Israeli crime-fighting system tested on Palestinians
- Australia government ties to israel organised crime
- Australia in crisis
- Australia in trouble
- Australia is a Corporation of pretend laws
- Australia is a private owned corporation
- Australia Post pathetic
- Australia Post Track my item express post
- Australia Post you suck!
- Australia run and owned by criminal Jews
- Australia Terrorist Hostage Situation at Martin Place HOAX
- Australia to ovethrow Gaddafi
- Australia under attack
- Australia will ban growing your own food
- australia's corporate welfare
- Australia's Port Arthur Massacre Government and Media Lies Exposed
- Australia's richest person Gina Reinhart receives $764 million welfare loan
- Australia: Julia Gillard Wayne Swan Bob Katter And The Masonic Handshake
- Australia’s biggest tax cheats
- Australia’s NBN Co. is the Trojan for Internet censorship
- Australian Aboriginals shackled by Jewish Settlers
- Australian bodyguard helped Gaddafi's son
- Australian carbon tax scam
- Australian Carbon Tax to fund UN's crimes
- Australian cattle in the Middle East tortured by Zionist Meat Industry
- Australian Cattle industry cruelty
- Australian Constitution is invalid
- Australian Corporate Political Government
- Australian Courtroom procedures
- Australian Courts and Justices – Validation Diagrams
- Australian crisis actors
- Australian energy company CEO stands down after slew of racist remarks on Facebook
- Australian False Flag attack Riot police at NSW parliament house
- Australian Federal Police
- Australian Federal Police busted using fraudulent warrants
- Australian Federal Police Planting Drugs & Bombs
- Australian Federal Police raid Channel 7 over Schapelle Corby's incriminating evidence against the AFP
- Australian Flag
- Australian Government
- Australian Government $15 Billion spending on junk F-35 fighter jets
- Australian Government and industries run by the Jewish Mafia
- Australian Government are Jews
- Australian Government bailouts
- Australian Government charged with Treason
- Australian Government Grants scam
- Australian Government is a hoax
- Australian Government is not the Commonwealth of Australia
- Australian Government Jews
- Australian Government money grab $740 million 'unclaimed' super accounts seized
- Australian Government on Israel's leash
- Australian Government Pedophiles
- Australian Government's Pedophiles
- Australian Gun Control
- Australian Gun Control – Jews controlling unarmed Australian citizens
- Australian Gun Control controlling unarmed citizens
- Australian Human Rights Commission the Zionists
- Australian Immigration Government corruption
- Australian Immigration Policies – boat people
- Australian Jewish Government and their Corporate welfare tax havens
- Australian Jewish Government posing as Catholics and Christians
- Australian Jewish Government spying on Indonesia
- Australian Jewish Mafia
- Australian Jewish Pedophile Appeals His Already Too Lenient Sentence of 8 Years for Sodomizing 9 Boys
- australian jewish pedophile network royal commission 90 year suppression order
- Australian Jewish Woman Faces 74 Charges of Sexual Abuse
- Australian Jewish Woman Faces 74 Charges of Sexual Abuse.
- Australian Jews
- Australian Jews continue their reign
- AUSTRALIAN JUDGES ARE FRAUDS LIARS CRIMINALS TRAITORS & FOOLS.
- Australian Labour leadership change theatre
- Australian Labour Party links to criminal Jew Frank Lowy and World Cup Scandal
- Australian Laws and Government a fraud
- Australian Live Export animal abuse
- Australian Magpie Playing with dog
- Australian man Brendon O'Connell sentenced to at least 3 years for arguing with a Zionist Jew
- Australian Man Jailed For Confronting Zionist Jewish Spies
- Australian man jailed for offending a Jew.
- Australian Meat industry animal cruelty
- Australian meat Industry lies
- Australian Meat the Truth – FULL DOCUMENTARY
- Australian Mining Industry Rorting investigated
- Australian News
- Australian NSW farms being sold overseas
- Australian Organised Crime
- Australian Paedophile Dallas Clarke
- AUSTRALIAN PEDOPHILE RING EXPOSED; AUSTRALIAN GOVERNMENT
- Australian PM head of Satanic Lodge?
- Australian PM Masonic handshake
- Australian Police Accused of Mass Software Piracy
- Australian Police are Corporations not public servants
- Australian Police are not the Law only Corporations
- Australian Police charged with on-duty rape
- Australian Police Force
- Australian Police Force arrest man for wearing T-Shirt
- Australian Police hiding in civilian trucks
- Australian Police Pedo ring
- Australian Police tied to major drug trafficking
- Australian Prime Minister
- Australian Radar Detectors – Bel Sti
- Australian SAS helping CIA Mi6 (Al Qaeda) rebels in Syria
- Australian SAS role in Iraq revealed
- Australian Secret Detention Camps
- Australian State MPs boost their $153.000 salary by up to $80.000
- Australian Stock Report scammers
- Australian Tax Office fraud
- Australian Tax payer funds going to USA shareholders
- Australian taxpayers funding another $350 million yearly anti islam campaigns for our Jewish Governments
- Australian Weather man made
- Australian World Cup scandal
- Australian Zionist Government
- Australian Zionist Media
- Australian Zionist Terrorists training to fight for israel
- Australian Zionists
- Australias pedophile network
- Australias Zionist Meat Industry must be stopped
- Author: David Allender – Terrorized by SWAT Team
- Auto reviews
- Automotive Industry bailouts
- Automotive news
- Avoid Red Light and Speed Camera Tickets with Blocker Spray
- Azaria Chamberlain
- ✡ Jewish Sabbatean Frankist Satanic Ritual Abuse Survivor Vicki Polin – Child Sacrifice
- "Zionism financed Nazism"
- EPA should be called CPA = Corporate Protection Authority
- “May all Arabs die!” Israel Jews on Facebook express joy at Jordan bus crash that killed Palestinian pilgrims
- ‘I Was Raped By The CIA Medics’ Says Black-Site Survivor
- Baby boomer
- Bacterial Pneumonia Caused Most Deaths in 1918 Spanish Flu Pandemic
- Bad Cops
- Bahrain
- Bail Out The Bankers? Iceland ARRESTED Them and economy grew
- Bailing out Banks is all about more Greed
- bailout
- Bailout scam
- Bali Bombing Attack
- Bali bombings exposed
- Baltimore Bridge Collapse psyop
- BAN CIGARETTE TESTS ON ANIMALS!
- Ban Legal Giraffe Hunting!
- Bank financial planner scams
- Bank scams
- Bankers drug wars
- banks
- BANKS & “GOVERNMENTS”FORECLOSED WORLDWIDE
- Banks and Governments for Operating Slavery and Private Money Systems
- banks are getting taken to common LAW court for fraud !
- Banks are Jewish Swindlers
- Banned Herpes Mohel Still Circumcising Babies
- Banned Movie – Unlawful Killing
- Banned video of Jews selling foreskins for face cream companies.
- barack obama
- Barack Obama a CIA creation
- Barack obama's real name Barry Soetoro
- Barack Obama’s gay cover up
- BarackObama
- Baron Rothschild indicted in France over fraud case
- Barrack Obama CIA asset – Gulf disaster was planned
- Basfoods Ltd relating to its product "Victoria Honey"
- Basketball players use EPO
- Batman Massacre To Pass UN Gun Ban?
- Batman Massacre: WHY and HOW and WHO
- Batman was real
- BATR
- Bayer – Advantage for dogs
- Bayer deliberately infected asians and latinos with HIV
- Bayer has just sued the European Commission to overturn a ban on the pesticides that are killing millions of bees
- BAYER Pharmaceuticals
- BBC Now Admits AL Qaeda Never Existed
- Beat Monsanto at their own game
- Beatles were Satanic Jews
- beatpsoriasis.com exposed!
- Bee Pollen is contaminated
- Before the Zionist Jews gave the slavic refugees Macedonia. True Macedonians were Greek.
- Benefits of Sodium Bicarbonate – Baking Soda
- BENGHAZI LIBYA. EMBASSY KILLINGS NEVER HAPPENED
- Benjamin Freedman's 1961 Speech about WW1
- Benjamin Netanyahu
- Benjamin Netanyahu the Lithuanian
- Berlin Jews then and Berlin Jews now
- Bermuda Triangle Mystery – Secret Revealed – Full Documentary
- bernake
- Berrima Communications
- Berrima Communications – Michael John Darby
- Best Australian Radar Detector 100% safe
- Best Evidence You Have Ever Seen That Puppet Masters Script Mainstream News Reports
- Best friends
- Best Gun Control speech
- Best Marijuana Documentary EVER!
- Beth Hart "My California" Live on Mark & Brian
- Beware of Canola Oil
- Beware of St Patricks Marist College dundas
- BiBi Netanyahu wont take a vaccine
- Bible was invented by the Roman Catholic Jews
- BIBLICAL ISRAELITES WERE BLACK
- Biblical Proof That The Jews Are NOT ‘God’s Chosen People’
- BIC razors are crap
- Biden the pedophile
- Biden upset that blue roofs didnt burn
- Bidvertiser Jews
- big bang theory Mayim Bialik the Jewess satanic whore
- Big Pharma thrilled as autism treatment market predicted to reach $11.42 billion by 2028
- Bill Clinton and CIA Gave Iranians Blueprint for Nuclear Bomb
- Bill Gates exposed for Chemtrail funding research
- Bill Gates Favors The Death Panel and Vaccines To Decrease The World’s Population
- BIOAEROSOL research
- Biological Warfare
- BIRD FEEDS CAT & DOG
- Birds Eye Corn Fritters GMO Corn products
- Birth & Marriage Certificates Scam : Corporations make bonds and trade on NYSE with them
- Bisphenol A (BPA) Contaminating Our Food
- Black Lives Matter Is Funded by These 18 Jewish Corporations
- Black Lives Matter sponsors
- Black Lives Matters
- Black Salve & Healing Clay
- Black workers 'banned from Gare du Nord during Israeli president visit'
- Blackmores Vitamin D3 makes me sick.
- BlackRock now owns Ancestry.com
- Blacks riot because its their moral obligation to
- Blackwater/Xe the Vatican puppets
- Bless Rabbi Moshe Aryeh Friedman for telling the truth
- Blind dog rescue Fiona – Hope For Paws animal rescue
- Blocked again for sharing the truth on Facebook (Jewbook)
- Blood of Aussies shed to give Jews freedom
- blood sucking Jews
- Bloom Box: The Alternative Energy that Terrifies Obama
- BLS
- Blue Circle Corruption
- bob hawke the pedo
- Bob Hawke the zionist Jew
- Bobby Orosco and Robert Chavez the anal invaders
- Bohemian Grove were the Jewish Elite fuck each other
- Bolschevick Jews Killed 100 Million White Christians
- bolsheviks
- Bolshevism is Judaism (Zionism)
- Bono and Bill Gates-backed Global Health Charity EXPOSED as a Fraud
- Bono Partners with Monsanto G8 to Biowreck Africa
- Bono the Jew
- Book about killing gentile children becomes bestseller in Israel
- Boral Cement & EPA corruption
- Boral Cement corruption
- Boral Cement grant of USD $3.3 million
- Borat – Throw the Jew Down the Well!!
- Boston bombing make-up kits
- Boston Marathon Bombing
- Boston Marathon Bombing false flag attack by Jewish Government
- Bought a cheap 2013 Toyota Kluger from Toyota Australia
- Bowral Police enjoying Alexandra Reserve with off duty friends
- boycott China made products
- BOYCOTT CHINA…END ITS ANIMAL TERROR!
- Boycott israel and Coca Cola
- Boycott Israel Campaign 2012
- Boycott Israel the Zionist Fake Criminal Jews
- Boycott Kellogg's to remove GMO's
- BOYCOTT SHAKIRA…THIS ZIONIST LOVER!!!
- BOYCOTT ZIONIST IKEA
- BP Gulf Oil spill flesh eating bacteria (Corexit) Deadly dispersant
- BP links to assassinations
- BP oil flesh eating bacteria
- BP pedophile network
- BPA-Free Does Not Mean Safe. Most Plastics Leach Hormone-Disrupting Chemicals.
- Brad Pitt's Genealogy
- Brain Cancer Medical Marijuana
- brainwashing
- Brainwashing jewish children to become killers
- BREAKING ALL THE RULES
- Brendon O'Connell
- Britain United Kingdom
- Britain's Jewish Government child stealing exposed by EU
- British and American Jewish War Crimes During World War II
- BRITISH CONSTITUTION GROUP CHAIRMAN ROGER HAYES ARRESTED
- British German Royal family
- British Jewish Royal Family Satanic Pedophile practices
- British Jews tested mustard gas on indians
- British lad knocking out a group of Israelis on a beach in Thailand
- British MI6 SIS disguised as Syrian rebels cutting heads of innocent Palestinian men
- British News
- British Queen's Paedophile ring
- British Royal Drug Running
- British Royal Family drug dealers
- British Royal Family fakes
- British Royal Family jewish ritual sacrifices
- British Royal Family Jews
- British Royal Family Jews exposed
- British Royal Family Opium Business
- British royals ‘used to be cannibals dining on human flesh’
- British royalty dined on human flesh
- British SAS MI6 busted
- British SIS MI6 rebels terrorizing Syria again
- British Zionist USA CORPORATE Wall street gangsters
- BRITISH ZIONISTS
- Buddha – Greek God Apollo
- Bull Fighting and the Jews
- Bureau of Labor Statistics
- Burka Hijab Jews
- Burradoo fire
- But we're Jewish
- Buzz Charlton
- BuzzFeed
- C Roberts Trucking
- C.I.A. Busted For Dealing Drugs To Americans
- cabal
- Caltex's pedophile network
- Camel animal cruelty in India
- Can Jews Be Saved
- Can the criminal Jews stop Putin?
- Can we really separate Judaism from Zionism?
- Canada CDC Suggests “Glory Holes” For Safe Sex During Coronavirus Pandemic
- Canada criminalizes criticism of Israel
- Canada signing away their sovereignty to the United States
- Canberra Zionist Jews rally to support criminal Israel
- Cancer Charities Are Scams Run By One Jewish Family – Government Says
- Cancer Charity scams
- Cancer Council scams
- Cancer cure
- Cancer cure Cancer free from using hemp oil
- Cancer cure fighting supplements
- Cancer cures banned by the FDA
- Cancer fighting supplements
- Cancer Foundation Australia scams
- Cancer Free 2 year old from hemp oil
- Cancer Healed Naturally/Holistically
- Cancer is big business
- Cancer is finally cured in Canada but Big Pharma has no interest
- Cancer Is Not A Disease! — It's A Survival Mechanism
- Cancer is Not Trying to Kill You It is Trying to Save You
- CANCER KILLER – Natural Cancer Cell Killer 10000 Times Stronger Than Chemo!
- Cancer research a scam
- Cancer Research charities 2nd biggest fraud of the century
- cancer research fraud
- Cancer research has always been a money grab for zionists
- Cancer treatments a joke
- Cancer treatments that work 100%
- Cancer truth – blood ph acidity levels causes cancer.. not genetics
- Cannabinoid Facts: THC CBD CBN CBC THC CBG and Other Unique Phyto Cannabinoids
- Cannabis facts
- Cannabis Oil Fights Cancer
- Cannabis The Endocannabinoid System
- Capitalism Is Jewish Usury
- Captured UK Journalist – ‘None Of The Rebels Were Syrian’
- Car connection
- Car Industry collapse
- Cardinal George Pell the Jew has confessed to creation of false documents and 'reprehensible' cover-ups of child sex abuse
- cartridges for kickbacks scandal
- Cases where Psychic's information finds body or makes arrest
- Casualties of War
- Cat purrs help prevent heart attacks
- catholic
- Catholic Bishops of Satan
- Catholic Church admits to Atleast 200 Pedophile Priests in Philippines
- Catholic Church and organised Crime
- Catholic Church Exposed
- CATHOLIC CHURCH PROCLAIMS- "RENOUNCE YOUR FAITH OR DIE!"
- Catholic Pope Francis charged trial set for trafficking orphans
- Catholic Priest speaks about NWO the Antichrist
- Catholicism ( the Roman Catholic Jews).. now called the Vatican
- Catholicism = Zionists = Jews = illuminati = Freemasons = Satanism
- Cats Blowtorched to Death at Live Cat Market in China
- Cayenne Pepper
- CC's GMO Corn Chips
- CDC admits Covid19 is fake
- CDC Caught Hiding Data Showing Mercury in Vaccines Linked to Autism
- CDC confirms aluminum in vaccines linked to childhood asthma and AUTISM
- CDC Quarantine Station map and Immigrant map must see to believe!
- Central Australia 1978
- Chabad Lubivitch – The Jewish Mafia that runs the world
- Change Australian Government Entitlements
- channeled messages
- Charles Manson provides insight into the Jewish mentality
- Charleston Church shooting another staged event by the jews
- Cheale Meats animal cruelty
- Cheap Laurastar Steam irons buy now
- Check out Rabbi Shmuley promoting his daughters kosher sex butt plugs
- chemical companies and Pharmaceutical firms to contaminate our AIR our WATER and our FOOD
- Chemistry Expert: Carbon Dioxide Can’t Cause Global Warming
- Chemotherapy does not work 97% of the time
- Chemotherapy is not the answer to cancer
- Chemotherapy kills
- CHEMOTHERAPY WILL KILL YOU FASTER
- Chemtrail Info Day London 15th Dec 2012
- Chemtrail Jets identified! Evergreen CIA Owned Airline Dropping Poison On You And Your Family
- CHEMTRAIL SCIENTIST MURDERED AFTER GOING ON NATIONAL RADIO
- chemtrails
- Chemtrails and Carbon Tax
- chemtrails and vaccines have in common?
- Chemtrails are real
- Chemtrails Australia
- Chemtrails destroying the ozone
- Chemtrails in Moss Vale NSW Australia
- Chemtrails in NSW
- Chemtrails Poisoning All Life! Scientific Proof!
- Chemtrails poisoning our earth to control our food supply
- Cherokees Spoke Greek and Came from East Mediterranean
- Chevra Hatzolah – Gods chosen Terrorists need the best medical care too.
- Chicken Industry
- child rape
- Child sex abuse survivor Glen Fisher starts naming names like Bob Hawke etc
- China & Korea boiling dogs alive
- China and Rothschild
- China Dog meat trade. We demand EU embargo on China!
- China Korea South East Asia: Stop cooking dogs alive
- China Motors
- China owned by the jews
- China's Beijing Zoo puts their animals on the menu
- China's dog meat animal cruelty
- China's Opium wars with the British Jews
- China's Unit 61398" Israel's Phantom Cyber Enemy
- Chinese activists recently stood up to dog meat traders and rescued 900 dogs bound for slaughter
- Chinese Girl Gets Run Over Horrific Footage
- Chinese Grown vegetables are coming in branded as a product of New Zealand.
- Chinese Jews purchase of Israel's Ahava shows boycott is hurting
- Chocolate trumps fluoride in the fight against tooth decay
- Christ
- Christian
- christianity
- Christmas is banned – it offends Muslims – jewish propaganda!
- Christmas SANTA = SATAN
- Christopher Columbus the Jew
- chrysler
- Church of Satan got owned
- Church of Satan got owned by Jake Shields
- CIA
- CIA & Western media's total fiasco in Syria
- CIA = ISIS = Al-Qaeda
- CIA Admitted to Staging Fake islamic terrorist Jihadist Videos in 2010
- CIA Agent Exposes about jews
- CIA Agents – ISIS and al-Qaeda – two sides of the same US-minted coin
- CIA and George Bush
- CIA Busted For Dealing Drugs To Americans
- CIA child trafficking operation behind 99% of child kidnapping and child sex trafficking.
- CIA created Al Qaeda
- CIA created Facebook for $500 million
- CIA creates dictators to do their bidding
- CIA drug trafficking
- CIA exposed
- CIA faked Gaddafi death .. just like Osama
- CIA Funding and Manipulation of the U.S. News Media
- CIA Heroin
- CIA Influence on the Mass Media: How Disinformation Campaigns Work
- CIA israel Created Wikileaks and Anonymous so you believe crap like this…
- CIA jet crashed with 4 tons of cocaine
- CIA Jews created Facebook not Mark Zuckerberg
- CIA Operated Aerial Spraying Plane Carrying "Mutated" Virus Shot Down in China
- CIA pretending to be islamic terrorists bomb Peshawar election rally.
- CIA pretending to be Taliban suicide bomber kills Peshawar election rally.
- CIA recruited Nazi war criminals
- CIA running away before Boston bomb blows
- CIA runs everything
- CIA Seal Team 6 involved in Boston Marathon Bombing
- CIA Secret Prison: Polish Leaders Break Silence About Black Site
- CIA Secret Wars Killed 6 Million People – Government Coverup
- CIA WhistleBlower Susan Lindauer EXPOSES 911 some truths some not so true
- Cigar UFO Floating Over Brazil
- Cinnamon and Honey
- City with no Jewish rulers proves Government is not needed
- City without Government ( Max Nebraska )
- Climate Change
- Climate Change Hoax
- Climate Change Scam to Promote Carbon Trading System
- clinton
- Clive Palmer is dumping toxic wastewater into the Great Barrier Reef.
- CNBC Exec’s Children Murdered 1 Day After CNBC Reports $43 Trillion Bankster Lawsuit
- CNN fake Libya war footage exposed
- CNN FAKE LYBIA WAR FOOTAGE-EXPOSED!
- CNN reporter removed after covering Israel’s Terrorism against Gaza
- CNN Reporter: I Received Orders to Manipulate News to Demonize Syria and Iran
- CNN Special Report 1985 Electromagnetic Frequency
- CNN wants this video banned
- CNN's Dana Loesch into Necrophilia
- CNN's Dana Loesch loves Golden Showers
- COBRA Update: The Secret Space Program
- Coca-Cola has been a supporter of Israel since 1966.
- Cocaine in Coka Cola
- CODEX ALIMENTARIUS
- Cody Roberts zionist animal cruelty in Wyoming
- Coles found guilty of passing off bread made overseas as 'freshly baked'
- Coles open to RSPCA meat
- Colloidal Silver for acne rosacea
- COMMERCIAL LAW AND THE UNIFORM COMMERCIAL CODE (UCC) INSTRUCTIONS 0.5
- Commercial Liens – The Most Potent Commercial Weapon
- Committee of 300
- Common Law Rights Group
- communism in America
- Communism is Judaism
- Communist Dictum- Accuse the enemy of those crimes you are guilty of
- Communist Dictum:- "Accuse the enemy of those crimes you are guilty of"
- Communist Governments growing behind the Democracy fraud.
- Communist Jews Rothschild Soros and Rockefeller Definately Want Your Firearms!
- Companies that test on animals
- Complaint against Facebook and Web Of Trust
- Comprehensive study: There are ZERO Amish kids suffering from cancer diabetes or autism
- Confessions Of A Former Jew
- Confessions of NWO Jewish Zionists
- Congressional Medal of Honor – Satanic Sigil
- CONTRAILS vs CHEMTRAILS
- Copenhagen zoo – Swiss bear cub shares Giraffe Marius' fearsome fate
- Corporate Globalist Governments destroying Australia
- Corporate Government Law
- Corporate Slaves wake up!
- Corporate Welfare in Australia
- Corporations
- Corrupt Court Psychiatrists Role in family courts by John Aster on Dr Chalk commiting Purjury
- Corrupt Mayor of Wingecarribee – Duncan Gair
- Corruption in Australia
- Corruption lies and ABC Zionist propaganda
- Councils Destroying Communities
- coup
- Court Report – Ipswich Queensland – James Bowes
- Court Room scams
- Courtesy Notice – Andrew Scipione – Alleged NSW Commissioner of Police.doc
- Courtesy Notice – Gregory Eugene Smith – Alleged NSW Attorney General.doc
- Courtesy Notice – Tracey Hall – Alleged Sheriff of NSW.doc
- COVID vaccines make humans part synthetic part organic
- Covid19 scam
- COVIDSafe – AU PRIVACY ACT 1988 – SECT 94H
- Cowardly Marines
- Craig Speerin
- crazy bikes
- crazy rosbif
- Creating more Jewish Terrorists on the world.
- Creativity and Non-Conformity Now listed as a Mental Illness by Psychiatrists
- credit
- Crimes Against Fathers Paedophile Group
- crimes against fathers paedophile group exposed
- Crimes and Trials
- crimesagainstfathers.com exposed!
- Criminal Australian Government Jews
- Criminal Jews try to ban Golden Dawn
- Criminal Jews try to ban Jewish run Golden Dawn
- criminally insane Peter Nolan's crimesagainstfathers.com exposed
- Crowd of Jews afraid of a rat
- Cryptogon
- CSIRO depopulation plan GMO food
- Cuban Missle Crisis False Flag attack
- Cupid.com Online Dating Scams!
- Cure Cataracts naturally
- Currawarna resident warns pet owners over thefts
- Cyber Attacks and Anti Hate Groups attacking the Truth
- Cyber Attacks on my website
- cycle
- Cyclists and swimmers using EPO
- Cyprus giant Hail Attack
- Dad Builds Son Prosthetic Hand With 3-D Printer
- Dalai Lama is on CIA payroll
- Dallas Clarke defames non Jews
- Dallas Clarke jewish Paedophile from North Sydney
- Dallas Clarke Judicial Watch
- Dallas Clarke of judicialwatch & Ekky Software
- Dallas Clarke of judicialwatch.org.au fabricates stories
- damascus
- DAN GERTLER
- DANGEROUS IMPORTED FOODS
- Daniel Andrews the Pedo
- Daniel Wyoming
- Darius J Wright Interview – Soul Trap Shape of Earth Reincarnation OBE Dreams Purpose of Life
- Dark Secrets Of The Jewish Diamond Industry
- Data from the New Zealand Ministry of Health shows that the COVID vaccines have killed over 10 million worldwide
- David Bowie the paedophile Jew
- David Cameron’s Jewish Roots and the Jews Who Brought Him to Power
- David Duke Storms the Alex Jones Show
- David Icke
- DAVID ICKE – ROTHSCHILD ZIONISM
- David Icke: Was he right?
- David Koch Zionist slams Schapelle Corby
- David Letterman
- David Motari the dog killer
- David Raynard violent criminal
- David Rockefeller
- David Rockefeller's Shocking Confession
- David Schulberg
- David Wilcock
- Day before 911
- DDOS Attack by the Jews to our server
- DEA caught smuggling drugs into USA
- Dead German bodies from the Rhine meadow camps presented as Jewish bodies for the Holocaust Hoax
- Dead Jewish Terrorist
- Dead MI6 CIA Syrian Rebel
- Dean Baquet
- Dean Clifford Titles and Trustees – How to win in Court
- death
- deaths
- debate
- Decayed Meat Treated With Carbon Monoxide
- Decayed Meat Treated With Carbon Monoxide To Make It Look Fresh At The Grocery
- Deep Inside The Dupont Factories Where Teflon Was Being Made
- defend
- Defended his freedom against zionism
- Defending Israel is Elemental to Being an American
- Defending the name of JESUS against the Yeshua crowd
- Defense Base Act Class Action
- deism
- deist
- Deliberate Dumbing Down of the World
- Delimiter
- democracy
- Democracy is an illusion
- democrat
- Denmark annual dolphin slaughter
- Denmark hotels
- Denmark Jewish Governments stage Terrorist Attack
- Denmark Jews Legalize Beastiality
- Denmark Jews love animal sex
- Denmark royals
- Denmark Tours
- Denmark yearly mass dolphin slaughter
- Denmark zoo that killed Marius the giraffe puts down four lions
- Deport All Jews
- Design
- destroyed for Rothschild
- destroying farmlands
- Detective inspector Mathew Woods
- Detox from chemtrail poisoning
- Diana Deidan
- Diana Faked Her Death
- DICK CHENEY AND THEIR DRUG EMPIRE
- Dick Cheney's company invented Fracking
- Dick Smith food products
- Did Israel's Mossad Do 9/11?
- Did you know that Sandalwood has Anti-Cancer Properties
- Digilife online Pty Ltd ebay scams
- Dinosaurs Never Existed!
- Discouraged worker
- discoveries in Santorini about the Lost Atlantis
- Discovery of Oil in ISRAEL Ten Times Larger than World Average
- District Attorney's Office
- Disturbing images from Iran you rarely see
- DNA science finds Jews to be Turks
- Do not buy anything made in New Zealand.
- Do not donate to RSPCA
- Do you drink milk? Eat cheese ice cream etc?
- Doctors Earn $3.5 Billion in Kickbacks from Pharmaceutical Companies
- Doctors More Dangerous than Germs
- dod
- dod contracts
- Dodo cops blame for national internet outages
- DOES THE VATICAN HOLD YOUR MORTGAGE
- Dog cries from his dead owner
- Dog dies after being dragged by Porsche
- DOG DUMPED IN GARBAGE BIN ON NSW FAR NORTH COAST
- Dog Interacting with a Beautiful Child with Down Syndrome
- dog left in hot car outside Moss Vale Bilo
- Dog Meat Festival in China a massacre event taking place every year
- dog rescues another dog
- Dog saves family from Cobra attack
- Dog shot by police in Holly Hill recovering
- Dog theft rises in NSW
- Dog tied to back of car and dragged
- Dog used as bait to be ripped to pieces by fighting dogs
- Dog watching Marmaduke on TV
- Dog's paws belly severely injured after possibly dragged by car in Clewiston
- Domayne Computers Alexandria
- Domestic terrorists that serve and protect their Zionist Masters
- Don't believe in israels media machine
- Don't buy Apple iphone etc
- Don't tease Kermit the frog
- Donald Drumpf – Illuminati Jew
- DONALD TRUMP A CRYPTO JEW
- Donald Trump Jr & Eric Trump cowards
- Donald Trump Jr & Eric Trump killing rare animals
- Donald Trump Jr.'s big game hunt in Africa
- Don’t Let Bayer Overturn The Ban on Bee-Killing Pesticides
- Donmeh Jews
- Doping and animal cruelty allegations hit jewish greyhound racing industry
- Doritos contain MSG and GMO corn
- Dr Mehmet Oz
- Dr Oz Show
- Dr Philip Zelikow's Key Role in 9/11 Cover-Up
- Dr Stan Litras Dentists speak out Against Fluoride 22Sep2013
- dr vicky jennings reportedly dropped dead after suffering a sudden heart attack
- Dr. Andrew Moulden: Every Vaccine Produces Harm
- Dr. Faudci’s NIH division partly funded a lab to experiment on dogs
- Dracula TV series
- Dracula was a Jew
- dragon power
- Driving without License taken to court and DISCHARGED !!!
- drug smuggling the jewish way
- Drug trafficking in Australian Government
- Drugs and the CIA organised crime
- DuckDuckGo owned by Jews
- Dumb people become Police officers
- Dummy guide: Chemtrails (poison) compared to Contrails (condensation)
- Duped Americans bow the knee to the Jews’ monetary idol Satan
- duped by RSPCA
- Dyson DC35 Animal beware! Save your money.
- E-Cigs Have 10x More Cancer Causing Ingredients Than Regular Cigarettes
- Early Australian Zionism (1894-1927)
- Earth files
- Earth’s Alpha Predator: Zionist Mafia
- Ebola virus patented – by the zionists that created it.
- economic
- Economics & Markets
- Edinburgh – The real Jerusalem
- Editors Picks
- Edomites
- Education does not make you smarter
- EDWARD SNOWDEN IS MARK ZUCKERBERG’S COUSIN
- egg industry
- egg industry grinds baby male chicks alive
- Egypt puts 19 Americans on trial
- Egyptian archaeologists unearthed the ruins of a temple for the ancient Greek god Zeus
- Egyptian Revolution: What You’re Not Being told
- Egyption Pyramids
- Eight Jews suspected in alleged gang rape of 11-year-old girl in north
- Eisenhower's German Death-Camp
- Ekky Software kiddie fiddler
- el dorado gold mining
- Eldad Hagar
- elect
- electing
- election
- electoral
- electoral college
- electorate
- Electric car cemetery in France
- Electric car company Tesla has released ALL its patents to the public
- electro magnetic fusion
- Elena Kagan is an Associate Justice of the Supreme Court of the United States
- elephants of africa
- Elijah the pit bull shot twice left for dead but survived
- Elite Underground Tunnels and City Completely Stocked March 2013
- Elon Musk is Jewish
- Elon Musk is Part of the Illuminati Charade
- Elon Musk just another scammer
- Elon Musk quality
- Elon Musk scammed me
- Elon Musk the scammer
- End Anti-Semitism
- End Anti-Semitism Now
- Endive juice
- Energy
- Energy Drinks Contain Ingredient Extracted From Bull Urine And Semen
- Energy in the vacuum
- Energy Weapons used to start fires again
- England’s Jewish Aristocracy
- Enviroment
- Ephesians 6:12 KJV
- erdogan
- Eric Clapton is blowing the whistle on Jewish supremacy around the world
- Eric Clapton: "Israel runs the world."
- Eric Harroun worked in Syria for CIA
- Erin Rosthschild at the Super Soldier Summit
- Eros Association
- Esau / Edom
- Estimated 190.000 German Women Raped by US Soldiers After WWII
- Estimation
- ET Council: War with grey-Draco reptilian ETs is won
- EU allows greater spying on citizens
- EU carbon Tax fraud
- EU Carbon Trade fraud
- EU regrets hosting rabbi accused of Holocaust denial
- Eugenics in Australia: The secret of Melbourne’s elite
- Eugenics ~ Chemtrail genocide
- European cloud computing firms see silver lining in PRISM scandal
- European jewish royals killing naked children for fun at human hunting parties
- European Jews history
- European royals killing naked children for fun at human hunting parties
- European Union
- European-Descended Jews are Counterfeits and have no Blood line to Abraham
- Evalion Shut Down!
- Ever wonder why all islamic Terrorists are white skin? (Mi6 CIA SAS Mossad)
- Every Cancer Can be Cured in Weeks – Video
- Evidence Obama Born In Kenya Goes Beyond 1991 Brochure
- Evidence of Hannukah Story Found in Razed Hellenistic Fortress
- Evidence that Food Proteins in Vaccines Cause the Development of Food Allergies
- Evidence: Denver and DC Quakes Caused by Nukes
- Evils of Kosher Slaughter
- Evolution is a hoax
- Ex Victorian Police officer comments on Fines
- Ex Zionist Jew Says the truth about Judaism
- Ex-Agent: CIA Seed Money Helped Launch Google
- Ex-Australian Prime Minister Confirms Israel Attacked America
- Ex-FBI Agent Reveals What to Do If The Police Get in Your Face
- Ex-Pentagon official: MKO is a dishonest creepy Jewish cult
- Executive Council of Australian Jewry Incorporated Terrorists
- Executive Order
- Extreme Fraud At NOAA And NASA
- Eye Health – Barbara O'Neill’s Warning
- fabricating the news
- face cream
- face mask
- Face Mask facts
- Face Mask Policy
- Facebook & Google are CIA Fronts
- Facebook (Jewbook) blocked me again
- Facebook banned me again
- Facebook CIA connection
- Facebook CIA Project
- Facebook Community Standards
- Facebook created by Zionists not by a student
- Facebook ends deal with Web Of Trust
- Facebook Faces US $15 Billion Lawsuit
- Facebook founder called trusting users dumb fucks
- Facebook Mark Zuckerberg
- Facebook seems to have ended their deal with MyWot and partnered with other more reliable services.
- Facebook stop using MyWot – web of trust and moved to McAfee SiteAdvisor
- Facebook story a Zionist lie
- facebook tagging
- Facebook truth
- Facebook warnings
- Facebook's Privacy Problems
- fact
- Fact Check .org
- Facts about Israel's Economy
- Facts about the Milk industry & animal cruelty
- Facts you should know about the zionist dairy industry and animal milk
- factual
- failing Holden Car Industry bailed out again $275million
- failure to pay SPEEDING CAMERA OFFENCE
- Fairfax Media Group Jews line the pockets of a Terrorist
- Fake Al Qaeda
- Fake Boston terrorists
- fake hebrews
- fake israelites
- fake jews
- Fake Jews continue to abuse Semite Palestinian Children
- Fake man on the moon footage 1969 Apollo 11 mission
- Fake Muslim Preacher Omar Bakri Busted as Jewish Mossad Mole
- Fake Muslims Behead Man In Cold Blood
- Fake Muslims damage 3000 Jewish owned vines in the West Bank causing $60000 in damages
- Fake Muslims Disembowel Young Christian Boy
- Fake Muslims Enter Christian Home Butcher Husband Wife And Two Children
- Fake Muslims Take Christian Children And Split Their Heads In Two
- Fake Muslims Take Christian Out Of Car After Finding Cross
- Fake Muslims Use Women To Lead Men On
- fake revolutions
- Faking It: How the zionist Media Manipulates the World into War
- False Flag attacks & the American Interest
- False Report shows Queen down to her last million
- Family Raided by SWAT and Dog Shot for Not Paying Utility Bill
- Famous People talking about the Jews
- Farm to Fridge – The Truth Behind Meat Production
- Farmer feeds GMO corn to his pigs: they all become sterile
- Farming the Unconscious
- Farrakhan Blasts Obama On Libya Bombing
- FBI gets access to Telstra records
- FBI Releases Documents proving Adolf Hitler and Eva Braun fled to Argentina in a Submarine
- FBI rescues 79 child sex slaves in massive three-day Jewish prostitution sweep across the USA
- FBI says 'Australian ISIS jihadist' is actually a Jewish American
- FBI: Hitler Didn’t Die. Jews moved Hitler To Argentina
- FDA approves spraying meat with viruses
- FDA Finally Admits Chicken Meat Contains Cancer-Causing Arsenic
- Federal Police and the corporate watchdog the Australian Securities and Investments Commission (ASIC) have been unwilling to investigate board members of the Reserve Bank companies
- FEDERAL RESERVE CARTEL & THE 8 FAMILIES THAT RULE THE WORLD
- Fedex
- FEMA Cameraman has Proof 9/11 was an Inside Job
- FEMA Camp Coffins
- FEMA Detention Camps Built in Australia
- FEMINISM & HOMOSEXUALITY – HOW HETEROSEXUALITY WORKS
- Fiat Currency is a hoax
- Fighting Cancer with Salad
- finance
- financial
- Financial Bailouts
- Finks bikie gang members and associates exposed
- Finland criminals
- Firefox Plug-in Warns Users of NSA Surveillance
- first Jewish synagogue in China was built in 1163
- First Torah Completed in Australia’s Parliament in Canberra
- five point plan
- Flat Earth
- Flat Earth at 70000 feet
- Flat Earth maps removed from the Bible
- Flat Earth Matters
- Flaxseed Oil and Cottage Cheese – A Cure For All Cancers? – Amazing results reported for almost every type of cancer including many in Stage IV.
- Flaxseed oil reflux and flu symptoms
- Florida Jews Agree to Distribute Satanic Temple Materials To School Children
- Flu Vaccine
- Flu Vaccine dangers
- Flu virus
- Fluorescent lights – Dirty Electricity
- Fluoridated Water Is Public Murder On A Grand Scale
- fluoride
- Fluoride Awareness Grows: No Science to Show Fluoride Prevents Tooth Decay
- Fluoride toxicity in water
- FLUORIDE TRUTH hits the TV in AUSTRALIA
- Fluoride Used by Nazis to Sterilize Inmates and Make Them Docile
- Fog Light laws
- FOIA
- Food additive Castoreum
- Food Companies that Serve You ‘Wood’
- Footage showing USA Secret Service assassinating JFK
- Forbidden Knowledge – History of the Jew
- foreclosure
- Foreclosure on Banks and Government via UCC filings by OPPT
- foreclosures
- Foreign Exchange currency trading scams
- Foreign Minister of Israel: Admits Murder in Europe
- Foreign Relations
- forensic labs
- Foreskin face cream from SkinMedica promoted by Oprah Winfrey
- FOREX Trading and Market Manipulation
- Former 9/11 Commissioner admits missile hit the Pentagon
- Former CIA Black Ops member confesses NWO plan
- Former CIA Head blows the lid off fraud wars
- Former CIA Officer Israel Controls U.S.A Government & Media
- Former FBI Chief ADMITS Government is Involved in Most 'Terrorist' Attacks!
- Former FBI Chief Ted Gunderson Admits Government is Involved in Most ‘Terrorist’ Attacks!
- Former Monsanto lawyer now FDA Czar leads raids on Amish organic producers
- Former Mossad Chief: "We've Been Involved in a Clandestine War For Quite Some Time With Iran"
- Former MP Terry Martin walks free having sex with a 12-year-old girl.
- Former SAS soldier Ben Griffin – I Will NOT Fight For Queen and Country
- Fossil Fuel hoax
- found 200 abused children and a cemetery full of ritually sacrificed children in Guatemala
- four generals of I.S.I.S Terrorist group
- FOX & NBC
- FOX Jews Attempts to Justify Police Brutality Against Children- So Russell Brand Let them Have It
- Fox News and the Royal Saudi Jewish owners
- FOX News Whistle blowers UNBELIEVABLE!!!
- France and Russia jews bomb Syria not ISIS .. killing children
- FRANCE – Joking about jews is illegal—but Muslims are fair game
- France is another Jewish Occupied Territory by the Jew World Order
- Frank Lowy 911 mafia
- Frank Lowy and 9/11
- Frank Lowy and World Cup Scandal
- Frank Lowy Institute
- Frank Lowy Institute of criminals
- Frank Lowy Zionism and 9/11
- Frank Lowy's Lichenstein
- Franklin D Roosevelt and Josef Stalin – Jews wanting to take down Germany
- FRAUD and LIES of Mother Teresa
- Fraud and Slavery Even a Child Can Understand It
- Fred Christ Trump
- Free America
- free energy circuits
- free energy cover up
- Free Energy Devices Yes They Are Real
- Free Energy Inventors and Mysterious Deaths
- Free Energy Researchers assassinated
- Free Gaza
- Free Masonry is another form of Judaism
- Free Palestine say Jewish Canadians
- free syrian army
- FREEMASON ILLUMINATI TARGETED ABUSE
- Freemason Jews
- Freemasonry / Illuminati started by the Jews
- Freemasons
- Freemasons open a lodge at Buckingham Palace
- French
- French are waking up to the Jew World Order
- French Jewish Governments stage terror attacks in Paris
- French Jews beheading Muslims in Morocco 1912
- French Jews demand Twitter reveal IDs over hate speech
- Fresh food people my ass!
- From Chemtrails to Pseudo-Life: The Dark Agenda of Synthetic Biology
- Frontline is useless not good for flea control
- fsa
- Fuck Israel!
- Fuck the Police!
- Fukushima nuclear blackmail
- Future of Mankind REVEALED | Lisa Wetsel
- G7W aka David Raynard (Stadler) is a convict
- g7w of mywot – David Raynard the convict
- Gaddafi a true hero to his people – killed by the Jews
- Gaddafi and life in Libya – facts you cannot deny
- Gaddafi fake Death photo exposed
- Gaddafi gold for oil plan
- Gaddafi's double killed – real Gaddafi still alive
- Galactic federation of light
- Galactic federation of light Deception
- Galactic federation of light is a scam created by the CIA
- Galactic Messages
- Garden of Eden Depicted in Ancient Greek Religious Art
- Gardeners discover bag of Jewish ISIS flags in Israel
- GEET Plasma Reactor Motor
- geithner
- Gen. Dempsey
- Gen. Martin Dempsey
- Gender Equality Ambassador
- Gene Simmons says gentiles are for manual labor
- Gene Simmons: I haven’t slept with 4600 Jewish women
- Gene study settles debate over origin of European Jews
- General Emil Strainu Confirms Reptilian ETs
- General Motors
- General Wesley Clark: Wars Were Planned – Seven Countries In Five Years
- Genetically Modified Cholera Bacteria to be Released in Australia
- Geneticist Traces Mysterious Origins of Native Americans to Ancient Greece
- genetics
- GENTILE INTERMARRIAGES WITH THE ROTHSCHILDS
- geoengineering
- Geoengineering Parliament documents HAARP Chemtrails
- Geoengineering: Destroying Antarctica to drill
- Geoengineering: Destroying the Atmosphere
- George Floyd
- George Galloway – Jesus was a socialist
- George Galloway Destroys Jewish Zionist Argument In One Swipe.
- George Galloway rips fox news about Cuba
- George Galloway speech on Israel Zionism and Palestine
- George Galloway vs Ignorant American
- GEORGE PELL’S RITUAL ABUSE CRIMES
- george soros
- George Soros a Jew with a false Greek name
- George Soros buying flooded farmlands
- George Soros Nazi Jew
- George Soros the Zionist Nazi with a fake greek name.
- George Soros Uses 'Human Rights' To Get Off Criminal Charge
- George the brave Jack Russell Terrier who saved five children
- George W. Bush
- Geranium robertianum L
- German
- German Jews were the NAZIS
- German police storm home of elderly woman who debated the Jewish holocaust lies
- German Television Exposes Holocaust Lies
- German Zionists officers served under Hitler
- Germans Refuse to Return Picasso Painting Sold by Jewish Man Fleeing the Nazis
- Germany
- Germany arms Saudi Arabia Jews to protect Israel
- GERMANY MUST PERISH – JEWISH PLANS TO KILL GERMANS
- Getting women into the workforce was a good way for the Jews to trick the goyim that it was “progress” when really it was family destruction.
- GetUp links to Nazi jews
- Gilad Sharon the Satanic Lying Fake Jew
- Gina Rinehart's Jewish Father
- Giraffes gunned down for family holiday 'fun'!
- Glass Steagall
- Glass Steagall Act
- Global ban on glyphosate – Monsanto GMO Jews
- Global Child Sex Slave Trade run by Jews
- Global Earth Agenda debunked
- Global Map of Genetically Modified Crops
- Global porn ring: WA detective jailed over child images
- Global Research
- global warming
- Global Warming Scam
- globalists
- GM food banned in Monsanto canteen
- GM Foods Linked to Organ Disruption in 19 Studies
- God
- God showed the rainbow to Noah
- God will destroy America if you dont love israel
- God-given reason
- Going GM-Free in Europe But Not USA
- Goji Juice
- GOLD = Cursed Prison Of Souls
- gold buried beneath the world trade centre
- Gold Coast Police investigated over protection racket around Jewish organised criminals
- Golden Dawn
- Golden Dawn another Jewish Psyop to create friction
- Golden Dawn strikes fear into the heart of the Jews that run Europe
- Goldman Sachs’ role in killing democracy across Europe
- Google adsense account banned or website blocked
- Google AdSense ad serving has been disabled to your site
- Google Adsense is a scam
- Google Adsense Scammed Me
- Google alternative Search Engine
- Google created by the CIA
- Google Earth Lead Developer Believes World Is Flat
- Google Jews suppressing the truth
- google news
- Google Page Rank Checker
- Google reports 'alarming' rise in censorship by governments
- Google Youtube aka CIA censorship
- GOP VOTING FRAUD CAUGHT ON TAPE AGAINST RON PAUL-Georgia county
- gordon duff
- Got Cancer? Milk poisoning cover-up Fox whistle-blower of Monsanto
- Goulburn NSW Police organised crime ring exposed
- Goulburn Police assault and taser Bowral man to death
- Goulburn Police detective Mathew Wood anti semite nazi
- Goulburn Police inventing stories again
- Goulburn Police LAC inspector detective Mathew Wood Racism anti semitic assault on Chris Roubis
- Goulburn Police LAC Racism anti semitic assault on Chris Roubis
- Goulburn Police LAC Racism intimidation and assault on Chris Roubis
- Goulburn Police Paedophile ring exposed
- Goulburn Police Racism anti semitic assault on Chris Roubis
- Goulburn TyreMasters pathetic
- Government continues to bailout failing Industries
- Government Employees are even worse than Welfare recipients
- Government Hollywood Pedophiles & Cannibals
- Government Shutdown No Problem: CIA Drug Money Funds Chemtrails
- Governments are Corporations do not submit
- Governments control your weather
- Governments poisoning us on purpose
- GPS is a ground positioning system not satellites
- Graffiti on Captain Cooks Cottage two days out from Australia Day
- Grand Capital Pty – forex trading
- Grand Capital Pty – LiqPay – privatbank scams
- Graphene in vaccines
- Graphene Oxide in Anesthetic
- Gravity is a hoax – MIT Professor debunks it
- Great Vegan Athletes
- Greece bailout an idiots view
- Greece has been voted ‘Best Cuisine in the World’ for 2024/2025
- Greece please don't give money back to the Jewish Banksters that lost it all into their pockets
- Greece sold out for $340 billion
- Greece's Jewish Golden Dawn Political Party
- Greek (Jewish) leaders discuss Athens debt crisis anew
- Greek Cities in Turkey
- Greek coins from around the world
- Greek connections of Norway
- Greek Egypt
- Greek Jewish Government busted: Sister Of George Papandreou Owes State Almost Half a Billion In Taxes!
- Greek Orthodox Church of Zionists
- Greek Riots
- Greek True History
- Greek Village Calls Golden Dawn To Protect Them From Jewish Gypsy Crimes
- GREEK-SPHINX- DELPHI MUSEUM GREECE
- Greeks fighting back against their Zionist Jewish Government
- Greeks in ancient Egypt
- Green news
- green power
- Green River Bar
- Greens MP John Kaye speaks out about RSPCA scams
- Greta Thunberg’s handler Luisa-Marie Neubauer is a Rothschild
- Greyhound Racing
- GTMobile best mobile plans and network
- Guatang people refuse to pay road tolls
- Guest Post, Christianity, Islam, Friends, Politics, Philosophy, Humor, History, Accounting, Quotes, Nature, Musings, Environment, Work, Lifestyle, Drama, Women, Men, Research, Spirituality, Random Tho
- Guillotines In America
- gulf states
- Gun charge against former election candidate Mark Aldridge is dropped
- Gun Laws prevent good people from defending themselves
- Gun Store Running AR-15 Giveaways on Facebook Sees Page Shut Down
- Gunter Pauli: The Blue Economy
- GWEN TOWERS (Ground Wave Emergency Network)
- HAARP
- HAARP 2011 2012 Earthquakes
- HAARP and Chemtrails in Australia
- HAARP Australian weather weapon
- HAARP bases around the world
- HAARP bases world map
- HAARP Chemtrails working well. Strange bird formations \ birds dying all over earth
- HAARP clouds in Australia Geo Engineering
- HAARP connection in Japan earthquake
- HAARP Floods Being Created to Intentionally
- HAARP in Australia causing cyclones and floods
- HAARP over Japan skies before earthquake
- HAARP ring over NSW Australia
- HAARP ring produces possible tornado REAL TIME as it pulses
- HAARP ripple cloud effect hits NSW VIC QLD
- HAARP the economic terrorist weapon
- HAARP Warfare
- HAARP Weather Warfare CONFIRMED by History Channel
- Hague
- halal meat cruelty
- Half of Venezuela’s Jewish community fled under Hugo Chávez
- Halloween is satanic
- Hamas (Mossad) fired rockets from civilian areas during 2012 war
- HAMAS = Israel
- HAMAS = Mossad
- Hamas is a Creation of israel Mossad
- HAMAS is Israel
- Hamas works for israel
- Hammond Indiana police officer allegedly abusing his K-9 unit
- Hank Aaron Dead Two Weeks After Taking The Covid-19 Vaccine
- Hanukka origins
- Hanukkah Menorah derived from demonic origins
- Hanukkah origins
- Hard Proof Sydney Martin Place Hostage Crisis was a Movie Set
- Harms to Our Children's Health from Classroom Wireless Radiation
- Harvey Norman / Domayne not very australian
- Harvey Norman reviews are false
- Hatecrimes
- Haunted locations
- He couldn't move his four legs he lay exhausted on the street with many wounds on his body
- He tried to rush his daughter to the hospital after an ISRAELI BOMBING
- Health
- Health Benefits of Plum and Plum Juice
- Health Care fraud
- heating our planet
- Hebrew Bible
- Hebrew is Greek
- Hebrew or the So-Called Negro?
- Hebrew Roots Movement Exposed
- Heineken International promote dog fighting
- Hello my name is Tarkhan Batirashvili. My fake Muslim name Abu Omar al-Shishani
- Hells Angels president in court
- Helmsley Trust gives $22 million to Israeli institutions
- Help us campaign against the hypocrisy of the RSPCA
- HEMP REPLACES EVERYTHING MADE WITH OIL
- HEMP REPLACES THE OIL INDUSTRY
- Hemp seed oil Australia Made
- Hemp War Conspiracy
- hempstead
- Henry Ford Built a Hemp Car That Ran on Hemp Fuel 80 Years Ago
- Henry Kissinger and his ladyboy wife
- Henry Kissinger ordered the creation of AIDS
- Henry Speerin Paedophile/ sex offender NSW
- her shadow minister husband and former Health Secretary Patricia Hewitt were all linked to a group lobbying for the right to have sex with children
- Herb Robert’s Gift against Human Diseases: Anticancer and Antimicrobial antiviral antibacterial and antifungal
- HERE IS A VICTIM OF NELSON MANDELA WHO WAS "NECKLACED" WITH A RUBBER TIRE FILLED WITH GASOLINE
- here’s what the media WON’T tell you about Russia bombing Syria
- Hero cat tries to revive her mate
- Hero dog pulls another dog from oncoming traffic
- Hezbollah leader Hassan Nasrallah
- HIDDEN CAMERA EXPOSES Zionist programming in American Schools
- hidden ET evidences
- Hidden History – Egyptians in Australia
- Hidden King Marcus Manuel
- Hidden Towers Radio Frequency & Mind Control
- HIGH COURT OF AUSTRALIA trespass
- Highly Toxic
- Hillary Clinton Covered Up Pedophilia by Ambassador Who Was Obama and Hillary Donor
- Hillary Clinton Exposed Movie She Banned
- Hillary Rodham Clinton
- Hinduism
- History of American False Flag Operations
- History of complaints over Sydney abattoir animal cruelty
- History Of Prison Camps
- History of the Greek Bizantine Empire
- History of the Jew
- History of the Khazar Empire – todays Jews
- History Reviewed: When Jewish Chameleons Boast
- Hitler Escaped to Argentina & Died Old Age
- Hitler funded by elite Jews
- Hitler on Zionists/Jews
- Hitler the Gay NAZI Jew that loved Scatology
- Hitler was a British Agent
- Hitler Was A British Agent Tasked With Creating Israel
- Hitler was a homosexual prostitute in Vienna
- Hitler Was A Rothschild And So Was His Daughter Angela Merkel
- Hitlers Jewish NAZI soldiers
- Hitlers mass slaughter of semite palestinians for israel uncovered.
- Hitlers sexual tastes
- hoax
- Hollow Earth Revealed- Series
- Hollywood Holocaust Hoax cousins who last saw each other in Auschwitz meet for first time in 70 years
- Hollywood Jews exposed
- Hollywood Producer Claims Boston Bombing was a "False Flag Attack"
- Hollywood screenwriter C. Jay Cox caught molesting a boy
- holocaust
- Holocaust Hoax will become compulsory for all schools in Australia
- Holocaust HOLOHOAX! Steven Spielberg Exposed!
- HOLOCAUST is a Jewish Ritual
- Holocaust lie
- Holocaust lies by Zionist Karen Pollock: British MP intimidated
- Holocaustianity: Zionism’s Big Lie!
- Holroyd City Council attacks Greenpeace
- homes for veterans
- Homo sapien sapiens originated in Australia not ‘out-of-Africa’ – DNA evidence
- Homosexuality Is Part of Jewish Tradition
- Honey benefits
- Hope For Paws Animal Rescue
- Horrendous Child Abuse By Jews
- Horrible Jew Monster Gene Simmons Claims Whites Destroyed Rock Music
- Horse Racing kills
- Horse urine in Cocal Cola
- How Adolf Hitler helped the Jews
- How Australia disarmed everyone except the criminals
- How Britain France and Russian Jewish leaders double cross Germany..
- How Britain France Poland and Russian Jewish leaders started the war against Germany
- How Britains Biggest Racists and Financiers Created Zionism – by Mark Burdman
- How Bush's grandfather helped Hitler's rise to power
- How CIA Kills Countries – CIA economic hitmen
- How Convenient: Piece of 9/11 Plane Found in Manhattan? Feds Floundering to Save Their Asses
- HOW DOES THE JUDAIC CABAL KEEP THEIR CATTLE ON THE PAYROLL
- How Does The Pentagon Get Rid Of Millions Of Damaged Soldiers? OVER-Medicate Till They Die!
- How Facebook Secretly Foil Your Activist Plans against Zionism
- How Giant Patent Troll Intellectual Ventures Does Business
- How Greece Could Take Down Wall Street
- How Healing Our Bodies Will Dissolve The Matrix
- How israel created hamas
- How Jewish Face cream is made
- How Jews tore Europe apart
- How Long Will a Chained Dog Drink When it's Been Deprived of Water?
- How Many Starving People Does It Take To Create A Jewish Billionaire?
- How Pedophile Royal Saudis are Exploiting Syria's Girls
- How Putin is so successful in avoiding foreign Jewish spies
- How the Global Warming / Climate change Scare Began
- How the Israel Lobby engineered Islamophobia
- HOW THE JEWS CREATED THE ZIONIST KINGDOM OF ‘SAUDI’ ARABIA
- How the Jews fake Terrorism
- How The Jews Mock Jesus Christ
- How the Jews Treat Christians in USA?
- HOW THE ROCKEFELLER OIL COMPANY – THE BUSH DYNASTY – AND IBM … DID BUSINESS WITH NAZIS
- How the Turks invented the Jew
- How the Vatican created islam
- How the Weather is made in Australia
- How they fake Terrorism
- How to be a VICTIM
- HOW TO BE A ZIONIST SLAVE
- How to decalcify your pineal gland
- How To Defend Yourself Against Astral Energies
- How to destroy Chemtrails
- How to Detect RSPCA Deception in Court
- How to get a good EDUCATION
- HOW TO KILL A DRONE Airstrike:
- How To Make a Judge Run Out Of The Court Room
- How to Make an Orgonite Orgone
- How to Make Cancer Cure Hemp Oil Safely
- How to Make Medicinal Hemp Oil Safely
- How to spot a staged Terror attack by Jew World Order
- How to stop Alzheimer's
- How US Rabbis & Israel Traffic In Human Organs & Money Laundering
- How Zionism infiltrated the USA
- How Zionists Divide and Conquer
- http://intrapower.net.au/
- HuffPo Hypes ‘Ancient Christian Gay Marriages’
- Human baby meat served in 90% of American fast food places
- Human experiments
- Human Experiments by your Government
- Human Rights Campaign Demands Christian Schools Abandon Beliefs or Lose Accreditation
- human rights violation
- Human trafficking in Israel
- Human trafficking in Israel a $ 1 billion industry
- HW Bush Was a CIA Agent Involved In The ASSASSINATION of JFK
- hydraulic road plates
- Hydro Tasmania asked to explain cloud seeding in catchment day before flooding
- Hydrogen Peroxide Therapy
- Hydrogen vehicle system DIY
- I CREATED AIDS to DELIBERATELY DEPOPULATE HUMANITY – Dr Robert Gallo
- I support the Greek people against fascist banker tyranny
- I Warned the Syrians that the Jews Would Destroy Them
- I wish to resign and cease considering myself a Jew
- I'm a clinical lab scientist Covid-19 is fake WAKE UP AMERICA
- I'm a marine and I took an oath to defend the Constitution I didn't take an oath to defend these jewish banksters
- I'm Related To Dracula Says Prince Charles
- Ian R Crane NWO agenda
- Ian Thorpe is nervous
- Iceland Dismantles Corrupt Gov't Then Arrests All Rothschild Bankers
- Iceland revolution
- ierissos
- If you see this lady take off.. there is about to be another false flag attack
- If You Speak Out You’re ‘Suicided’
- iGen Night Vision 20/20
- illegal dog meat abattoir… RSPCA did nothing!
- Illuminati – Zionists in the Music Industry Exposed
- Illuminati Australia Canberra Kabbalah Qabalah
- Illuminati Exposed – The Video Alex Jones won't show or talk about!
- illuminati Jews exposed
- Illuminati Jews Terrorize Control Turkey
- illuminati members exposed
- Illuminati Symbolism: 2012 London Olympics
- Immigration Multiculturalism to divide and conquer
- imperialism
- Impersonation of police officers
- Import email accounts in Microsoft Outlook 2010
- In 1917 Jacob Schiff gave three hundred New York Zionists $20 million and sent them to Russia
- In ancient Greece bees were used on some of the earliest coins made in Europe
- In China zoo live Cows are being fed to Tigers to entertain tourists
- In Judaism Satan is God
- In WW2 the ashkeNAZIS Looted Artwork and blamed the Germans
- Indian Economy Is Finished! Another Rape Victim Of The Jewish Banksters.
- Indian plant compound gedunin kills cancer cells
- indigenous Australians came under the Flora And Fauna Act
- Infant-Felatiating Jew Rabbi ‘Accidentally’ Hacks Off Baby’s Penis
- Infinite Vacuum of Space
- Infomercials
- INSIDE JEWISH BOHEMIAN GROVE
- Inside Monsanto The Truth.
- Insider trading 9/11
- Insulting RSPCA can be expensive
- Integral Energy / Endeavour Energy a joke
- INTEL MUST CLOSE ITS PLANTS IN "KIRYAT GAT"
- Intel spy chip made in israel
- Intelligence
- International
- International Jesuit Tyranny
- international jewish drug company made a hit list of doctors who had to be "neutralised"
- international law
- Internationals Satanism – The Power Behind the NWO = Jew World Order
- Internet
- internet crimes
- Internet Trolls
- interview
- Invisalign no braces
- inxmail.com.au spam
- Iowa vote fraud
- IPSWICH Qld appearing in Propia Persona
- Iran Is Already Under Attack
- Iran is surrounded by terrorist USA bases
- Iran sentences 4 to death in biggest bank fraud case
- Iran sentences CIA operative to death
- IRAN: USA lies
- Iraq
- Iraq Whistle Blower Mordechai Vanunu our hero
- Ireland infowars
- IS – RA – EL What does the name Israel mean?
- Is Alex Jones A Zionist
- is CSG safe?
- Is Global Warming being caused by HAARP and Related Weather War Technologies?
- Is Hollywood run by the Jews? You Bet! they run everything nasty.
- Is Organic a Scam? – Nutrient Differences
- ISIS (CIA Al-qaeda israel Mi6) been treated in Turkey
- ISIS Terrorists EXPOSED 100% AS CIA OPERATION
- islam
- islam animal cruelty
- Islam has been Zionized
- Islam is Judaism
- Islam's influence in the creation of America
- Islamic Muslim Terrorists
- islamic terrorists are faked by Jews
- islamic Terrorists are just another Jewish scam
- islamic terrorists are not islamic – but jewish
- Islamic terrorists were invented by the Jews
- islamists
- Israel
- Israel 'faked al-Qaeda presence'
- Israel Admits Forcing Birth Control On Ethiopian – True Jews
- Israel among most corrupt developed states
- israel and its allies are terrorists
- Israel and its allies only goes to war against the innocent
- israel animal abuse torture
- Israel army wearing diapers so they stop shitting themselves
- israel biological weapons
- Israel bombing Palestinian schools with white phosphorous
- Israel celebrates successful 9/11 operation on Purim holiday
- Israel chemical weapons
- Israel children send love to palestine
- Israel creates fake deaths to blame Palestine
- Israel creates fake enemies – Chinese cyber attacks
- Israel cyber attacks
- Israel Defence Force talking shit to University students
- Israel did 9-11 by Alan Sabrosky Marine Vet US Army
- Israel Did Fukushima
- Israel driving America’s ‘welfare Cadillac’
- Israel Gov Jews Inoculates 30000 Children with Active Polio
- Israel has a nuke in New York City. Australia guilty of laying false debris trail for MH370
- Israel have Ron Paul in their pockets
- Israel imported 25000 kids for their organs
- Israel iron dome hoax
- Israel is a person not land
- israel is Hamas
- Israel is paying internet workers to manipulate online content
- Israel is the land of Satanists and Pedophiles
- Israel Jew Soldier learns about Karma
- Israel Jewish Blood Diamonds Protest 2014
- israel Jewish hands involved in Sudan civil war
- Israel Jewish Soldiers wearing diapers so they stop shitting themselves
- israel Jews attack young semite Palestinian boy to death
- Israel Jews Exposed! 2014
- Israel Jews IDF experts at fighting against unarmed semite arab women and children
- Israel Jews injects Palestinian prisoners with dangerous viruses – human experiments
- israel jews now plant knives after the kill palestinians
- israel Jews poison Palestinians water well
- Israel Jews pretending to be muslim terrorists again
- Israel Jews spraying sewage on Palestinian streets
- Israel Jews Threatens Europe With "Jihad Terror"
- Israel Jews Using Internationally-Banned Weapons in Gaza Assault
- Israel Jews White Phosphorus attacks on UN schools in Gaza
- Israel Lobbyist – We Need more False Flag attacks to Start War with Iran!
- israel missle defence hoax
- israel mossad website explains who ISIS is
- Israel Not looking for Peace Nor Talks But this…
- israel nuclear weapons
- Israel Products to boycott
- Israel Rushes to Rescue Al-Qaeda (CIA Mossad) Terrorists in Syria
- Israel secretly targeting US war veterans
- Israel soldier is haunted by the people he murdered
- Israel soldiers using children as human shields
- Israel Tanks verse Palestinian rocks. And our Jewish Media still call it a war?
- Israel tenticles in Australian Government
- Israel terrorists pretending to be muslims again
- Israel the Nuclear Hypocrite!
- Israel Torture Palestinian Children by Electric-Shocking
- israel using biological weapons on the genuine semite palestinians again.
- Israel using Hamas (CIA) to terrorize their own people to blame Iran
- Israel using make up to fake wounded for the media
- Israel Vaccine shots faked
- Israel wants no peace
- Israel wants WW3
- Israel warns about marrying American Jews
- Israel Was Behind JFK Assassination
- Israel world order
- israel's attack on Fukushima – Radiation Equal to 10 Hiroshima Bombs Every Hour Since 2011
- Israel's best seller exposes Jews fake history
- Israel's children learning the trade of hatred and racism
- Israel's chosen Christian Pastors – herding the sheep to Hell
- Israel's Hamas agents pretending to be muslim terrorists
- Israel's insult to American Jews
- Israel's iron dome missile defense is a hoax
- israel's iron Dome missle system
- Israel's Loyalty Oath Exposed
- Israel's Master Plan
- Israel’s soldiers detained 90 children last month
- Israeli children are allowed to carry guns by law
- Israeli Citizens Running American Australian French British Russian German Government
- Israeli jets dropped explosive-laden food cans as bait for starving displaced Palestinians
- israeli jew asher moses
- Israeli Jews Burn Greek Orthodox Church Land In Jerusalem
- Israeli Jews Harvesting Black and Hispanic Childrens Organs
- Israeli Mossad BUSTED for London Bombing
- Israeli organ-trafficking network busted in Turkey
- Israeli site shows photo of kids dressed as burning Twin Towers for Purim
- Israeli Soldiers Sexually Abuse Palestinian Children
- Israeli soldiers throw a DISABLED MAN out of his wheelchair as he went to help a girl the ISRAELIS had just shot & left to die.
- Israeli Students Paid $2000 Each to Troll the Internet
- ISRAELI tank murders CIVILIANS in a car for no reason!
- Israeli Terror WMD Facilities
- Israeli Terrorism Against America
- Israeli TERRORIST 'Nofar Mizrahi' who shot dead 17 Year Old
- Israeli zionists calling Jesus a stupid bustard
- Israeli's destroying Christian cemeteries
- Israelis Are Not Jews and American Leaders Are Not Christian
- Israelis torturing non Jewish children. 2014 Australian documentary film.
- IT News
- It was all Greek.
- It Was Greek Culture That Taught Us to Be Jews
- Italian Mafia are Jewish
- Italy's bishops pass Vatican-backed rule that child molestation does not have to be reported
- It’s Official: Fish Feel Pain
- Its even reached the stage where #ISIS souvenirs are openly sold in #Turkey #Zionist #Jew #Motherland
- Jack Welch
- Jacob Greenberg alias Mark Zuckerberg Facebook founder and grandson of David Rockefeller
- jacob rothschild
- Jacob Rothschild takes down Malaysia Airlines MH370 members of a patent semiconductor
- Jacquie Seemann | Partner THOMSON GEER – Sydney Jewish Laywers trying to take down our website
- JADE HELM/FEMA “Hanging Training” Photos Leaked
- Jakarta Catholic Nuns animal cruelty
- James Samuel Newbill left dog on chain to starve to death
- Janet Jackson
- Japan Offers to Enrich Uranium for Iran
- Japans Earthquake and HAARP involvement
- Japans tsunami
- Jason Warne Shane Warne conmen
- Jay Carney
- JB Campbell: “kill all the Jews now”— it’s them or us
- Jeff Rothschild helps the U.S Military censor civilians
- Jennifer Lopez who thinks it's ok to beat and anally electrocute animals for fashion!
- JEROME DALY HAD TAKEN ON THE BANKS THE FEDERAL RESERVE BANKING SYSTEM AND THE MONEY LENDERS AND HAD WON
- Jerusalem in the Quran
- Jerusalem's Western Wall hints sacred site NOT built by Herod
- Jesse Ventura – Secret Underground 2012 Base at Denver Airport
- Jesus
- Jesus Christ is NOT a Jew
- Jesus was born in Bethlehem of Galilee not Jerusalem
- jet fighters
- Jew admits "Holocaust" is a fraud and a PSYOP
- Jew Feminist Honcho Hates Having “White” Skin
- JEW FEMINSTS
- Jew gets kicked in the ass
- Jew in New York
- Jew Jon Ritzheimer staged anti islam rally now wants your $10 million for protection
- Jew List: 20% of the Richest People in Britain are Jews
- Jew posing as Islamic Leader Commands Female Genital Mutilation of Two Million Women
- Jew Rabbi raped boys inside synagogue
- jew ritual murder of gentiles (GOYIM)//Blood Libels & Sacrifice
- Jew spits on a Christian father walking peacefully with his son
- Jew tool of multiculturalism to demolish western civilization
- Jew Tunnels found in all synagogues worldwide
- Jew World Order
- JEW WORLD ORDER DECLARED 2014
- Jew World Order: Massive End The Fed Organizer in Germany Gets Car Fire Bombed
- Jew-liar Gillard
- JewBelong.org
- Jewess attacks man then cries wolf when man defends himself
- Jewess Founder of “Code Pink” Arrested for Subversion in Egypt
- Jewish alien/human hybrid bloodlines with all their close relatives dating back to ancient Khazar / Babylonia.
- Jewish Ambulance Service for Jews in New York
- Jewish America
- Jewish American Government terrorism
- JEWISH AMERICAN PEDOPHILES ARE ALLOWED TO FLEE TO ISRAEL TO AVOID ARREST
- Jewish ancestry a lie
- Jewish animal abuse
- Jewish animal cruelty
- Jewish archive of terrorist attacks
- Jewish Armed men attack Pakistan school
- Jewish Artwork
- Jewish ASIO agent In charge of mkUltra in Australia
- Jewish Australia Day
- Jewish “Sex Party” candidate tells Australian Jews to vote for her
- Jewish Banker's manual
- Jewish Bankers Declare U.S.A & Europe Conquered
- Jewish BBC NETWORKS – Mr John Nathan-Turner 1980s Producer of "Doctor Who"
- Jewish Blackmarket on ivory tusks
- Jewish Blood diamonds
- Jewish Blood Libel
- Jewish Blood Libel – Vampires are real
- Jewish Bolsheviks Murdered 66 Million In Russia
- Jewish British Royal Paedophile Ring
- Jewish Business Of Organ Trafficking
- Jewish Campaign to sell israel with crossbred Hotties
- Jewish child molesters that are never on the NEWS – WHY?
- Jewish child sex abuse
- Jewish Church of Scientology opens center in Israel
- Jewish CLEANSING OF REAL BRITISH aristocracy HISTORY
- Jewish College Offers Course Devoted Entirely To … PORNOGRAPHY
- Jewish Communist Dictum
- Jewish Conquistadors in the New World
- JEWISH CONTROL OF SAUDI ARABIA
- Jewish Corporate Welfare
- Jewish cotton farmers and black slavery in America
- Jewish Council in Greece has been looting Greece for years
- Jewish Crime Jewish Porn industry and Jewish prostitution industry
- jewish crisis actors
- jewish crisis actors for News Networks
- Jewish Cyber Attacks again on the Truth
- Jewish Democracy is a Dictatorship
- Jewish Depravity
- Jewish Drug Dealers
- Jewish Ex-Marine SPEAKS OUT on Israeli Involvement
- Jewish Expulsions and Exiles
- Jewish Facebook & Google are CIA Fronts
- Jewish Fake Holocaust Cremation Deaths Using 35 Year-Old Train Wreck Images
- Jewish False Flag attack – Counter Protest Shutdown Westboro Baptist’s Hate
- Jewish false flag attack crisis actors
- Jewish false flag operations
- Jewish food brands that will kill you
- Jewish food brands to stay away from
- Jewish Fox News gets owned by anti Zionist
- Jewish German Government Publication Promotes Incestuous Pedophilia as Healthy
- Jewish Germany
- Jewish God Moloch
- Jewish groups hail Obama’s executive action on gun control
- Jewish Gypsies attack greek towns
- Jewish hand behind the internet
- Jewish History
- Jewish history is a big lie
- Jewish History Professor Maury Wiseman denies Native Genociode and expells student
- Jewish Holocaust a lie
- Jewish Holocaust busted wide open
- Jewish Holocaust completely exposed
- Jewish Holocaust denial banned speech in the court room.
- Jewish Holocaust Enforcers killing non believers
- Jewish Holocaust exposed
- Jewish Holocaust Hoax – real footage
- Jewish Holocaust is a lie
- Jewish Holocaust real footage
- Jewish Holy Book quotes
- Jewish human organ trade in turkey stealing Syrian children
- Jewish Human Organ Trafficking
- Jewish invasion of Iraq
- Jewish inventor of ADHD admits it was fraud on deathbed
- Jewish Involvement In The Black Holocaust and Slavery
- Jewish irish slave trade
- Jewish Judge drops charges against duo over animal-torture videos
- Jewish Judge Patrick Durcan jails Holocaust denier
- Jewish kidney brokers sell organs from poorest nations on black market
- Jewish kids paint swastikas on synagogue “out of boredom.
- Jewish Knights of Malta created the CIA
- Jewish leaders demand Farrakhan denounce "Secret Relationship" book
- Jewish lie about spreading democracy to every country they invade.
- Jewish lies
- Jewish lies by the Media
- Jewish Mafia
- Jewish mafia controls the Fed Reserve and Central Banks
- Jewish Main Stream News Networks using Crisis Actors to create The News
- Jewish Man Exposes Israel's Lies
- Jewish man photographed covering himself in plastic bag during flight to separate himself from the filthy non jews
- Jewish masonry is influential in USA
- Jewish Meat industry
- Jewish Media Brainwashing
- Jewish Media claims British Royal Queen is poor. Here is the proof.
- Jewish Military arm is USA
- JEWISH MONSANTO FAMILY Were Jewish Slave Dealers And Owners
- Jewish Monsanto GMO food featherless chickens
- Jewish mother 'waged war on Christmas' and got their public school to cancel the holiday field trip
- JEWISH NAZIS
- Jewish New World Order
- Jewish News
- Jewish News Media Networks breaking News about a Jew that twisted his ankle.. yet no story about Jewish Terrorism
- Jewish Occult Connections
- Jewish Occult History of Canberra Governments
- Jewish Organ Harvesting – Where do the organs go?
- Jewish organ trafficking Center where kidnapped Syrians are stripped of their entire bodies.
- Jewish Organised Crime Lords
- Jewish Origin of Saudi Arabia and Wahabs Iraqi Intel Reported Wahhabis Are of Jewish Origin!
- Jewish origin of Sauds and Wahabs
- Jewish owned Google Facebook YouTube Yahoo Microsoft already delete forbidden truth articles and news that they don't want the public to know
- Jewish Paedophile Rolf Harris
- Jewish Parliament's porn habit revealed as 300000 attempts made to access Child Porn websites from work computers in last year
- Jewish peadeophile Dallas Clarke from Lindfield NSW
- Jewish Pedophiles
- Jewish Pharaohs reasons of Circumcision
- Jewish Pirates of the Caribbean
- Jewish Politicians Passing Bill to Ban Investigations Into Police Who Shoot Americans
- Jewish Pompeii turned into penis worship city
- Jewish Population from 1933 to 1948 got bigger not smaller.
- Jewish Porn industry XXX domain names now up for sale
- Jewish Porn site Xvideos is world's biggest
- Jewish Professor NOEL IGNATIEV calls for genocide says white males should commit suicide
- Jewish propaganda against North Korea
- Jewish Propaganda continues defaming Gaddafi as an evil Dictator to justify their invasions in Lybia
- Jewish protection racket
- Jewish protocols in governments
- Jewish Psyops against Germany exposed
- Jewish puppet regime – Sri lankan Army
- Jewish rabbi explaining why destroying Europe with mass migration is a good thing.
- Jewish rabbi: “Jews need to keep Muslims and Christians fighting”
- Jewish racism and hatred
- Jewish Refugees
- Jewish Religion Is a Fairy Tale
- Jewish representation in universities
- Jewish Ritual Child Killing
- Jewish Ritual Murder
- Jewish Ritual Murder – Synagogue of Satan
- jewish Ritual Murders Up to the Year 1840
- Jewish Russia
- Jewish Satanic Catholic Mass Grave Sites Of 350.800 Missing Children
- Jewish Satanic group says Oklahoma must give the devil his due
- Jewish Satanic High Priests in Hollywood
- Jewish Satanic Rituals in Governments
- Jewish SAUDIS PURCHASING THE BLOOD OF SYRIAN CHRISTIANS!!!
- Jewish scams & lies
- Jewish School courses
- Jewish School Courses Devoted Entirely To … PORNOGRAPHY
- Jewish school system introduce masturbation in fourth grade
- Jewish Secrets Of The Synagogue
- Jewish Soldiers hold guns and try to prevent man from planting olive tree
- Jewish Soldiers Served Hitler and the Nazis
- Jewish student caught painting Swastikas on her own door then claiming Anti-Semitic Attack
- Jewish Supremacism: My Awakening
- Jewish Syrian Rebels (Mi6 Mossad CIA) Caught Using Captured Prisoners As Suicide Bombers
- Jewish Takfiri terrorists strangulate Syrian girl in public
- Jewish teacher busted spreading racism and hatred against islam with lies to students.
- Jewish teen girl: “I’m a Jew and our Bible says that you’re like animals”
- Jewish teens say they vandalized Israeli synagogue out of boredom
- Jewish Terror and Tyranny in Russia
- Jewish Terrorist factory
- Jewish Terrorist groups – ADL = JDL
- Jewish Terrorists Bombed King David Hotel in Jerusalem
- Jewish Tradition
- Jewish Tymoshenko intercepted phone call – 'it's time to grab guns and go kill those damn Russians'
- Jewish Tyranny
- Jewish University Academics Say Pedophilia Is Natural and normal
- Jewish USA's depleted uranium shells deforming even animals
- Jewish Victim Card
- Jewish welfare group knows it is sheltering a paedophile
- Jewish woman becomes a demon when confronted by a street preacher in Israel.
- Jewish woman manifests demons after street preacher mentions Jesus Christ
- Jewish Woman Talks About Child Ritual Killings by the Jews
- Jewish Woman Talks About Ritual Killings
- Jewish World Bankers the real Drug Lords
- Jewish World masters of slavery
- Jewish World Order
- Jewish World War 1 & 2
- Jewish Zionism
- Jewish zionist criminals
- Jewish Zionist EDUCATION Minister Christopher Pyne
- Jewish Zionist terrorist groups
- JEWISH ZIONISTS SACRIFICE BABIES!!!!
- Jews
- Jews
- Jews "Raping the Women of Conquered Europe"
- Jews (Khazars) desperate to suppress the Holocaust hoax
- Jews – the infiltrated tribe of Judah
- Jews = Zionism
- Jews admit they are an invention
- Jews against Zionism
- Jews always owned Germany
- Jews always Pretending to be Muslims and Christians
- Jews and Opium Wars
- Jews and the Black Holocaust
- Jews and their creation of islamic terrorists and suicide bombers
- Jews and their Opium Wars
- Jews are Al Qaeda terrorists
- Jews are anti semite
- Jews are anti Semitic
- Jews are just a concept
- Jews are just a lie
- Jews are Khazars
- Jews are Khazars – anti semitism
- Jews are Khazars – Jews are Counterfeits and have no Blood line to Abraham
- jews are the anti christ
- Jews arrested after 250 child prostitutes ‘raped and branded with tattoos
- Jews arrested for harassing spitting at Gentile woman
- Jews attacking christians
- Jews – Modern Day Neanderthals
- Jews Banished 47 Times in 1000 Years – Why?
- Jews Beheaded King Charles in 1649
- Jews behind China buying up American companies fast
- Jews behind China buying up Australia
- Jews behind Covid19
- Jews behind Terrorist Bombings world wide
- Jews blood diamond trade exposed
- Jews born to kill
- Jews celebrate 911
- Jews challenging the people of East Ukraine with disastrous loss of human life.
- Jews Claim Jewish Jack the Ripper Only Killed Hookers Because of Antisemitism
- jews control new zealand
- Jews Control the Federal Reserve by Majority
- Jews created AIDS virus
- Jews created China
- Jews created fairytale al-Qaeda
- Jews created islam
- Jews creating islamic fear
- Jews Cry Persecution as Denmark Bans Animal Torture
- Jews crying wolf again in their own Mainstream News networks
- Jews cut palestinian boy arm off
- Jews declare war on Germany
- Jews defame Mel Gibson with fake twitter accounts
- Jews defaming opposition again
- Jews did 911 – CNN
- Jews DNA study settles debate over origin of European Jews history
- Jews do not exist
- Jews don't want blacks in their cemetary
- Jews expelled 1030 times
- Jews expelled from 109 countries since AD250
- Jews faking terrorist groups
- JEWS FIRST DECLARED WAR ON GERMANY IN 1933
- Jews first weapon of choice is World Slavery
- Jews from Europe arrive in Palestine 1947
- Jews harvesting the blood of the young
- Jews have been Expelled in 109 locations since AD250
- Jews have ruined every economy on the planet for their own profit.
- Jews hold mass prayer against peace talks
- Jews honoured on Australia Day for supporting Jews
- Jews importing African Invaders Destroying Southern Italy
- Jews in Australia create racism so we can fight each other so they can divide and conquer us
- Jews in Europe Hiding Their Identity More Often
- Jews invent enemies then send non jews to die fighting for them
- Jews keep Attacking Mel Gibson
- Jews kidnap Palestinian child from his father’s car for satanic ritual
- Jews kidnapping children For Sex – For Human Experiments – for organ trafficking – and for Blood Sacrifice to Moloch.
- Jews kill 2 Greek Golden Dawn members in drive way
- Jews kill 20 million in Congo
- Jews kill 66 Million christians in Russia
- Jews kill 66 Million Russian christians
- Jews killed more than 3 million Vietnamese people 2 million of them were Vietnamese civilians.
- Jews killing nature to produce a GMO synthetic world to control
- Jews know how to suck cock better than anyone
- Jews lead gun control ban to control the goyim
- Jews love sex with Children – Judaism Rules
- Jews love to suck dick
- Jews murdering Africans and looting African resources then when Africans flee into israel.. Jews don't want them
- Jews now want Mali: Gold: Africa’s third largest gold producer
- Jews of England Arrested in 'Coin-clipping' Scandal
- Jews of the IRA Terrorist Group
- Jews own Australia
- Jews own China
- Jews own the Black voice
- jews pay mexicans to wear jew disguises and protest gay pride parade
- Jews pay no tax
- Jews performing rituals on dead bodies to bring back their messiah
- Jews plant knives after they kill Palestinians
- Jews poison christian wells
- Jews posing as Muslim ISIS Terrorists – busted again
- Jews posing as Muslim Terrorists again- here's proof!
- Jews posing as Muslims openly want Shariah law implemented
- Jews posing as Muslims to push Sharia Law
- Jews pretending to be Muslim Terrorists again- here's proof!
- Jews Produce New Definition of ‘Holocaust Denial’
- Jews promote killing pregnant women and children
- Jews promote Rap to spread violence
- Jews Promoting Racism Again
- JEWS promoting Sharia law
- Jews Rule of the Supreme Court of the United States of America
- Jews Run the World
- Jews selling foreskins and sodomising babies
- Jews sharing pics of killing semite palestinian children again
- Jews shot children while eating chocolate and chips
- Jews Shun Their Own for Reporting Child Sexual Abuse
- Jews started WWI and WWII and many Wars past and present.
- Jews steal credit for every invention humans make
- Jews still looting our economies regardless.
- Jews sucking China dry
- Jews teach masturbation techniques inside a church
- Jews teaching children sex lessons in Kindergarden
- Jews the inventors of Communism and Satanism
- Jews today
- Jews torture and massacre priests nuns and choir boys in Marxist upheavals in Spain
- JEWS TRAUMATIZED AT GRAPHIC ANTI-ISRAEL DISPLAY IN AMSTERDAM
- Jews upset over NAZI salute in reverse
- Jews use Measles vaccine in Syria to kill up to 50 children
- Jews use media PSYOPs to dupe and subvert the gullible goyim
- Jews used China to bring in the NWO
- Jews wear many Masks
- Jews were invented
- Jews who suck the blood of true Frenchmen
- jews zionism world order
- Jews/Mayors Arrested For Harvesting Illegal Organs!
- Jews posing as Muslims to hate Christmas again
- Jews who run prisons finding many ways to fill their pockets with tax payers money again
- JFK death faked
- JFK praises Adolf Hitler
- JFK real killer
- JFK secret society speech before assassination
- JFK speech before he was assassinated
- JFK was assassinated after this speech
- Jill Abramson
- Jim Rogers
- jimmy carter
- JIMMY SAVILE- THE KRAY TWINS- CLIFF RICHARD
- Jobs & Careers
- Joe Hockey $270 a night to sleep in his own house
- John Hopkins University
- john howard masonic pedo jew
- John Kerry Crypto Jew
- John Lennon ''Show business is a extension of the Jewish Religion''
- Johnson & Johnson
- Johnson & Johnson Jews
- Joint Chiefs of Staff
- joke
- Jon Faine zionist
- jordan
- Joseph Goebbels
- Journalists in Syria killed by CIA rebels
- JP Morgan & the Saudi Arab Jewish Oil Colony
- JP Morgan silences (kills) 12 Bankers
- Judaism Incorporated is a criminal enterprise.
- Judaism Synagogue of Satan
- JUDAISM the religion of Death
- Judaism's Strange Gods
- Judaism’s Strange Gods
- Judeo christianity
- Judge condemns badger baiters who laughed as their dogs ripped animals apart
- Judge Napolitano
- Judge rules against ANZ late fees in a win for customers
- Judge rules Bank Of America foreclosures unconstitutional
- Judge who headed 'Drag Queen Story Hour' sponsor arrested on child porn charges
- Juicing cannabis miraculously saves lives
- Julia Gillard and Hillary Clinton playing Epstein Island dress ups
- Julia Gillard AWU corruption
- Julia Gillard Govt pays their Zionist boss Murdoch of Sky News $2m
- Julian Assange – Wikileaks on israel's payroll
- Julian Assange's The World Tomorrow: Hassan Nasrallah
- Julian Assange's Ties to Nazi Jew Cult
- Jury Rights Billboard Campaign Infuriates Prosecutors
- Justice Elizabeth Fullerton Supreme Court NSW
- Justice system corruption allowed Eugene McGee to hit and kill a cyclist
- K9 DOGS
- Kabbala
- Kalash: The Lost Children of Great Alexander
- Kamala Harris fooling you
- Kangaroos slaughtered each year by Jewish Australian Governments
- Karen Hudes a CIA PsyOps
- Karen Hudes Exposed
- Karen Hudes interview
- Karens General Store / New Berrima Post Office
- Karens General Store Circus of Horrors
- Karens General Store Mafia
- Karens General Store New BErrima
- Karens General Store New Berrima Washing away Petroleum spills into storm water drains
- Karens General Store Organised Crime family
- Katherine Lisa King kept dogs in bunker for years
- Kellogg's Loves GMO Contamination
- Kelloggs cereal deadly
- Kelloggs Cereals
- Kelloggs GMO Corn flakes
- Ken Caldeira – Captain Chemtrails
- Ken O'Keefe: "I'm Ready to DIE [for Gaza]
- Kerry Stokes Australia’s number one perjurer
- Kevin Richardson – The Lion Ranger
- Kevin Rudd did not want to become Israel's puppet
- Kevin Rudd kicked out of office by Israel Zionist Jews
- KFC – not real chicken
- KFC Environmental health investigation
- Khazaria / Babylonian King ordered them all to convert to Judaism
- Kick out the Jews from the Greek Government
- kidnapping
- kiled
- kilkis
- kill
- killer
- Killing America
- Kim Beazley Human Sacrifices
- Kim Kardashian – porn star
- King edward VII
- King George V
- King of kings
- King Tut the European Egyptian's
- Kingdom of God
- Kingpins and Cutouts Aliens and Hybrids
- Kings Charles & The Good Bishop.
- KKK – klu klux klan and the NAZI Jews
- Klaus Schwab’s NAZI roots FINALLY TRACED
- Klu Klux Klan were Jews
- Knight of Malta George H.W. Bush
- know the lies
- Know Your Enemy (Jesuits and the Vatican)
- KONSTANTINOS PLEVRIS VS EBRAIOI
- KONY 2012 CIA scam exposed
- Kosher Halal animal cruelty
- Kosher Slaughterhouse
- Kosovo Liberation Army
- Ku Klux Klan
- L'Oreal products tested on animals and Palestinian children.
- Labor and Liberal members vote *against* a Federal anti-corruption commission
- Labour chiefs: It’s OK to have sex with 10-yr-olds
- Lady GaGa the German italian Jew
- LAGRANGE MISSOURI POLICE kill innocent dog
- Lahood Motors are criminals
- LAND CLAIM AGAINST PARRAMATTA CITY COUNCIL SERVED BY CONQUEST BY SOVEREIGN DE JURE
- LANG HANCOCK ON STERILIZING ABORIGINES 1984
- Laser Pointers Banned In NSW Users Face $5000 Fine
- Last good Cop fired for reporting bad cops
- Laurastar China made Junk
- Laurastar do not buy one
- Laurastar iron systems great deals
- Laurastar steam iron massive sale
- Laurastar steam iron ripoff – unreliable – expensive to fix
- Laurastar steam irons
- Laurastar steam irons 2012 review
- Laurastar steam irons China made. Reliability issues. Expensive to fix.
- Laurastar steam irons pathetic
- Laurastar steam irons wholesale prices
- Law institute of Victoria pedophiles
- Law Student "Schools" Policeman On His Gun Rights
- Lawful Disobedience: ARREST THAT JUDGE!
- Leading Israeli Rabbis Defend Manual for For Killing Non-Jews
- Legal burden of proof
- Lemuria: The Hidden History of Mankind's Motherland
- lending
- Letter from Albert Einstein in 1948
- Li Zongwen from Wuhan
- Lib Dem Baroness Tonge quits party over Israel remarks
- Liberty Kennedy missing persons
- Library Apologizes For Hosting Rainbow Dildo Butt Monkey to Entertain Children
- Libya
- Libya Tripoli still want Gaddafi
- Libya vs Zionist USA morals
- Libya War – Voices of Deceit – President Sarkozy
- libyan
- LIBYAN GRAVE SITE OF ABU SALEEN PRISON IS FAKE
- Libyan president Gaddafi & Saddam murdered for introducing the gold dinar
- Libyan president Gaddafi murdered for introducing the gold dinar
- Libyan War update Sept 22 .. the truth!
- LIBYAN WOMAN RAPED MUTILATED BY NATO ARMED GANGS IN LIBYA
- Life
- Life Saving Colloidal Silver
- Like all things… Syrian civil war was created by Zionist Jews
- Lindt cafe shootout Martin Place Sydney
- Lindy Chamberlain the Satanic Sacrifice
- Link between HAARP and earthquakes
- Lion Nathan Tooheys New beer
- Lionel Nathan Rothschild
- Liqpay scams
- List of Companies Using Aborted Human Fetal Cells As ‘Flavor Enhancers
- List of Greek warriors inside the wooden horse at Troy
- list of toxic sanitizers is surging—now at 75
- Little puppy-dog Star was left to die all alone in a box…
- Living
- Living in the Private
- Local Government and Councils are illegal
- London Jewish Cannibals
- Lord Justice George Fulford paedophile
- Lord McAlpine (child abuser)
- Lord protect us from the jews
- Loreal animal testing
- Lost Jewish Empire Uncovered in Russia
- LOUIS FARRAKHAN – U.S. Shadow Government Truth Arab Spring IRAN War with CHINA & RUSSIA
- Louisa Hope – Jewish Crisis Actor of Sydney's Lindt Cafe siege
- M.D
- Maccabees were Greeks
- Maccabees were Jewish fake Greeks
- Macdonalds Kelloggs Kraft KFC serve you wood
- Macdonalds pushes vaccines
- Macedonia (Greece)
- Macolm Turnbull the cat killer Jew
- Macquarie bank corporation owns YOUR ROADS
- Made in China
- Madeleine Albright Defends Mass-Murder of iraqi Children
- Madeleine McCann found
- Madonna the satanic Jew of Kabbalah
- Mafia Jewish Manipulation Of Gold
- MAGA
- Magna BSP
- Majestic group
- Majestic/illuminati using alien technology to cause a catastrophe
- MAJESTY TWELVE
- Making a Killing: The Untold Story of Psychotropic Drugging – Full Movie
- Malala
- Malala Yousafzai
- Malcolm X fake death
- Malicious libel from WEB SHERIFF jews claiming I am infringing copyright
- Man attacks UNICEF fundraisers raising money for Gaza
- MAN BEATS COURT BALIFFS & PREVENTS EVICTION ON HOME REPOSSESSION
- Man charged over the deaths of 25 ponies
- Man cures his spinal meningitis with raw foods
- Man Haron Monis ASIO agent
- Man left to die outside Dandenong police station
- manhattan
- Many world’s leader’s worship Satan
- Map of Ptolemaic Egypt
- Marching to Zion
- Marco Daniel Rusterholz framed for murder by Corrupt Zionist Government
- Margaret Sullivan
- Margaret Thatcher Funeral £8Million
- Margarine was originally manufactured to fatten turkeys
- Margie Abbott – merchant banker at Rothschild
- Marijuana a Cure for Cancer
- Marijuana Cannabis Weed Pot Oil Extract
- Marijuana Cannabis will never be legalised
- Marina Abramovic
- Mark Aldridge – Police don't like my blogs
- Mark Zuckerberg
- Mark Zuckerberg and human trafficking on Kauai Hawaii… Another Epstein island.
- Marketing scams
- Martin Dempsey
- Martin Luther King was another Masonic Controlled Opposition just like Hitler.
- Martin Place Sydney CBD terrorist seige – false flag staged attack by government
- Mary Sparrowdancer
- Masonic club
- Masonic pedophile gene rosen FEMA worker – sandy hook actor
- Mass grave uncovered containing dozens of Palestinians killed in 1948 war that founded Israel
- Masters of Deception
- Match.com online dating scam
- Matthew Guy starved his pet dog to death
- maurice strong
- Max Delezenne
- May 15 1991 the driver killed Kennedy
- MAY 20/21 2012: Illuminati occult rituals and human sacrifice during the "Ring of Fire" annular eclipse
- may all Jews die now
- McDonald's real meat scam
- McDonald’s Australia Uses Worm Meat Fillers But Can Legally Call It 100% Beef
- McDonalds Burgers fund israel war crimes across the globe
- McGrath Foundation fraud
- McGrath Foundation scam
- MCGRATH FOUNDATION scams
- MCGREGOR CASTING – New Documentary TV series
- Meat and Dairy — Cause Cancer
- meat and milk production
- Meat From Diseased Animals Approved For Consumers
- Meat is illness
- Media Brainwashing That Puppet Masters Script Mainstream News Reports
- Media use actors to fake news
- Medical Cannabis for Epilepsy Treatment
- Medical marijuana cannabis
- Medical Marijuana in Australia
- Medicine and the Law
- Medicine Hijacked by the Jews
- MEET Oogy – found in a dog fighting ring
- Meet the 'Crisis Actors' of the Syria-'FSA'
- Meet the Charlton McCallum Hunting Safaris zionist cowards
- Meet the Scherffs alias The Bush Family of Jews
- Mel Gibson against the Jew World Order
- Mel Gibson shares the truth
- Mel Gibson vs Roman Polanski
- Melissa Bachman banned from South Africa
- Message from the Galactic Federation of Light 3/23/12
- Message FROM the Militia to Civilians 2012 STAY STRONG STAND FIRM & UNITED!
- Message to Police
- Messages from our Galaxy
- Met Police murder dogs
- Metallica – James Hetfield kicks dogs
- Method of curing AIDS with tetrasilver tetroxide molecular crystal devices.
- Mexico 7.9M Earthquake PRE-PLANNED = MAN MADE
- Mi6
- MI6 SAS CIA rebels
- Miami Police Shot Protester then laugh about it.
- Michael Baden
- Michael Charles Dyson did Port Arthur Massacre
- Michael Jackson molded by Jewish hands
- Michael John Darby cheating on Vanessa Darby
- Michael Savage now admits Bilderberg Group is in control of the economy
- Michelle Obama in the 80's
- Michelle Obama Is A Man!! MUST SEE!!
- MICROWAVE COOKING is Killing People!
- Microwave radiation from mobile phone towers is almost certainly destroying bees
- Microwaves "nuke" your food at a cellular level
- Microwaves absolutely decimate the nutritional value of your food
- Middle East
- Mike Bozzuto the pedophile Jew
- Mike Jine
- Milk
- Milk industry
- Milk Industry animal cruelty
- Million Vets March Clashes with DC Police
- Milosevic
- Mind Control & Conditioning
- mines
- Minneapolis Police start Riot
- miraculous Graviola tree
- Missing Children
- missing gold at world trade centre
- mistake
- mitt romney
- MK-ULTRA. CIA program on Mind Control.
- Modern Education makes you dumb
- Moloch the Jewish God of child sacrifice
- money
- money laundering
- Monsanto
- Monsanto Attorney now Supreme Court Justice
- Monsanto food control
- Monsanto GMO Crop seeds are poison
- Monsanto growth hormone in milk
- Monsanto Guilty! France convicts big ag firm of chemical poisoning
- Monsanto hired mercenary Blackwater to infiltrate anti-GMO groups
- Monsanto is destroying us
- Monsanto NWO depopulation plan GMO food
- Monsanto Owned Companies (DO NOT BUY LIST)
- Monsanto Roundup deadly to all
- MONSANTO wants to kill the bees to make way for its “super bee”
- Monsanto's got a place in government FDA
- Monsanto’s Infertility-Linked Roundup Found in All Urine Samples Tested
- Monsanto’s Jewish Supremacist History
- Monsanto’s Roundup causes birth defects Cancer and DNA damage.
- Monsanto’s Roundup is Killing Human Kidney Cells
- Moon Hoax By Way Of Hollywood
- Moon Landing
- Mordechai Vanunu the hero
- More AWU Funds rorting by Julia Gillard and friends
- more dogs die in police care
- More fake Gaddafi Horrors Exposed
- More False News by Zionist media networks to convince us to hate the muslims
- More Jewish Terrorism
- More proof Jews origins are Turkish Khazarian not hebrew.
- More proof that Israel and its Zionists run Australia
- More smoke bombs by HAMAS (Mossad)
- More Than 22000 Brave Nurses Refusing to Submit to Mandatory Vaccinations
- More Than 40000 Orthodox Jews Hold Rally About Risks of Internet
- moscow
- mosquitoes used to spread our Governments lab made diseases – bio warfare
- Mossad & CIA death squads behind Syria bloodbath
- Mossad In Syria
- Mossad made up fairytale al-Qaeda
- Mossad still wearing their Star of David when they pose as islamic Terrorists
- Mossad Truck Bombs on Sept 11 – 911
- Mother of Islamic Terrorism is the Jews
- Mother Of Obama’s Murdered Gay Lover Speaks Up
- Mother Teresa the fraud
- Mother Teresa Was A Zionist Crook And A Fraud
- Movie: Wilding
- Mr. Mal Davies published the truth about RSPCA is cruel
- MULLAWAYS MEDICAL CANNABIS
- Multiculturalism is a weapon of war
- Multiculturalism is a zionist war weapon.
- Multiculturalism the Jewish tool for destroying civilizations
- Multiquip Transport assault and threats Boral Cement
- Multiquip Transport harassment and threats
- Multiquip Transport terrorizing New Berrima
- Mummified Baby Depicting Elitists Sacrificial Beliefs?
- murder and mystery [Catholic Church Exposed]
- Murdoch's media malpractice and the genetic altering of human beings through DNA vaccines
- Murdoch’s papers didn’t report on Ghislane Maxwell's arrest
- Murdock ruined rival competitor iTV by hacking their system
- Mushroom cancer cure
- muslim
- Muslim animal cruelty
- Muslims outraged at police advert featuring cute puppy
- Muslims in Burma became flesh food for Buddhists working for the Jews World Order
- Mycenean Greeks in Pretani (Britain)
- Myobrace no braces for children
- Mysterious Honey Discovered That Kills All Bacteria Scientists Throw At It
- Myths Of The Jews
- MyWOT – scams with facebook
- myWOT app is dead folks
- myWOT convicts
- myWOT criminals in real life
- MyWot Reviews – MyWot Trustworthiness Exposed
- mywot toolbar is a spyware – proof available
- MYWOT Web Of Trust Review: MyWot.com can’t be trusted!
- mywot.com – Unethical Company SCAM
- MYWOT.COM Has a POOR Reputation!
- mywot.com loses in court
- mywot.com web of mistrust
- mywot.com web of trust scam
- N.A.S.A : Alien Spacecraft & Moon Ruins
- Nader
- Nala – Scared stray Pit Bull living in a ditch – rescued!
- Naming and Shaming – The List Of Israel’s Agents Within British Politics
- Nancy Pelosi and JFK
- Nanites in our foods
- Nanotechnology Found In Popular Food Products
- Napoleon began to become Jew-wise
- NASA – Proof Of Image Tampering/Censoring
- NASA admits chemtrails
- NASA admits chemtrails – 10 July 2013
- NASA caught deleting UFO photos from its website
- NASA engineer admits they can't get past the Van Allen Belts for space travel
- NASA fake images vs Flat Earth
- NASA Fake Mars rover landing
- NASA Lies
- NASA space challenger crew still alive
- Nasa's Biggest Secret
- natalie ellis dog bowl
- NAtional socialists and ZIonists. The result is a NAZI Party
- Nationofchange.org run by George Soros the NAZI Jew
- Native American
- Native American 10 Commandments:
- Native Americans never scalped people
- Native Greeks riot over Jewish Government again
- NATO Crimes In Libya
- NATO Turkish airlines exec on arms shipped to Islamists (Jewish Regimes) in Nigeria
- Natural Cancer Cures that work
- Natural Flavoring Made From Anal Secretions of Beavers
- Natural News
- NAZI coins
- Nazi Eugenics program being revived in USA
- Nazi Hunter Vic Alhadeff can’t tolerate Holohoax jokes even though he is one
- Nazi Jew Pope Benedict XVI
- Nazi Jew Queensland police woman calls Aborigines 'scum bags' and 'oxygen thieves'
- Nazi Jew Vic Alhadeff
- NAZI Jewish Plutonium experiments on humans
- NAZI JEWS
- Nazi Jews Being Funded With U.S Tax Dollars Again
- NAZI JEWS invasion of Iraq
- NAZI NATO JEWS FUCK OFF!
- Nazi treasure
- NAZI Vatican Jews that control the CIA and the world
- Nazi zionist Eugenics program being revived in USA
- NAZIS
- ndaa
- NDS hacking executive James Murdoch
- Neighbours from Hell New Berrima
- Neil Armstrong Refuses to Swear on Bible that he Walked on the Moon!
- Nelson Mandela & ANC IS A COMMUNIST JEWISH FRONT
- Nelson Mandela Was a Terrorist
- Nelson Mandela Was a Terrorist for the Jew World Order
- neotame aspartame – artificial sweeteners will kill you
- NESTLE EXPOSED "Buy a chocolate and fund a zionist"
- NESTLE’S INVESTMENT IN ZIONISM
- netanyahu
- Netanyahu Worked Inside Nuclear Smuggling Ring
- NEVER AN HONEST JEW
- NEVER DONATE TO MCGRATH FOUNDATION
- Never trust a Jew?
- New 9/11 Eyewitness Evidence of Bombs at WTC
- NEW 9/11 FOOTAGE.
- New Berrima
- New Berrima General Store & Post Office
- New Berrima General Store filth and smell
- New Berrima General Store serving Rat feces and bird Droppings
- New Berrima Post Office
- New Berrima residents in Southern Highlands inhale Boral Cement dust everyday.
- New Berrima Store – No Food Safety
- New Berrima Store Post complaints
- New Born Calf saved from dairy farm
- New Israel Fund Australia Foundation
- New Natural Cancer Treatment
- new revenue streams
- New Study Finds Organic Diet For One Week Drops Pesticide Levels By 90 Percent
- New Study: Vaccinated Children Have 2 to 5 Times More Diseases and Disorders Than Unvaccinated Children
- New Testament
- NEW WORLD ORDER PLEDGED TO JEWS – New York Times in 1940
- New Years eve Sydney 2014
- New York Jew artist creates 'art' that is invisible and collectors are paying millions
- New York Jewish Rabbis Have Now Infected 14 Babies with Herpes After Sucking Their Penis
- New York Police proud of the Israel symbol on his bullet proof vest
- New York Rabbis Have Now Infected 14 Babies with Herpes After Sucking Their Penis
- New York Time
- NEW YORK TIMES
- New York Times Admits It Pushed Fabricated Evidence about Iraq Syria and Ukraine
- New York: More Babies Get Herpes from Penis-Sucking Ritual
- New Zealand Herald covers up reasons for sacking anti-Zionist cartoonist
- New Zealand importing China foods
- New Zealand vegetables are from China
- News
- News Media Press
- News media using actors to create news
- News Specimen, Breaking News, USA, UK, Europe, Africa, Asia, China, Japan, India, Government, Political Parties, Inspiration, Media, Random Blog, Culture, Arts
- Newtown Connecticut School Shooting a Hoax false flag operation
- Newtown CT School Shooting a Hoax false flag attack
- Nick Balgowan exposed!
- Nicki Minaj butt and tit implants
- Nicolas Sarkozy France's new President is a Jew
- Nicole Kidman’s Father Silenced by Ninth Circle Satanic Cult
- Nine news
- Nixon Tapes
- NO DRIVER LICENSE REQUIRED IN THE USA or Australia
- NO MORE ANIMAL CRUELTY
- No need to stop for the Police
- No Planes Hit the Towers on 9/11
- No War for Israel in Syria and Iran !
- Nobel Peace Prize
- Nokia N9 outlook synch failure music transfer failure
- norway
- Norway and its Greek origins
- not a charity
- Nothing in Woolworths bakery actually tastes any good
- NOTICE to all Australian Police
- NOW THE GOVERNMENT CAN LEGALLY KILL CHRISTIANS for the “crime” of worshipping Jesus Christ!
- NSA Mass Surveillance
- NSA whistleblower – Jews did Fukushima nuclear disaster
- NSA whistleblower Fukushima nuclear disaster – israel jews did it
- NSW BN BN97716141
- NSW Crime Commission Corruption
- NSW Jewish Board of Deputies arrested
- NSW Jewish satanic cults
- NSW Justice System corruption
- NSW owned by USA shareholders
- NSW Police Corruption
- NSW Police Minister Mike Gallacher resigns over corruption
- NSW Police ordered to pay legal costs to Rickey Caton and Adam Antram over toy dinosaur incident
- NSW POLICE SEIZE MULLAWAYS MEDICAL CANNABIS PTY LTD
- Nuclear Bomb hoax
- Nuclear smuggling by the Jews
- NWO Insider Reveals Entire NWO Plan in 1969!
- nypd
- NZ Christchurch Mosque shooting staged
- NZ secret ties with USA
- Obama did PsyOps for the CIA
- Obama dies in front of media audience. No one believes all that crap any more
- obama gay scandal
- Obama goes to a school to talk to the kids
- Obama Jewish puppet is donating 300 million US dollars to groups that will destabilise Syria.
- Obama to nominate Jewish economist Janet Yellen as new Fed chief
- Obama's Alleged Homosexual Past
- Obama's foreign Advisor
- Obama's pedophile brother
- Obama: A Rothschild Zioinist Jewish Puppet
- OBAMA; THE ROTHSCHILDS CHOICE FOR PRESIDENT
- Obama’s Gay Past Being Hidden By Killing Ex-Lovers
- OBE Master Given UNFILTERED ACCESS to HUMANITY'S FUTURE on the OTHER SIDE! | Darius J. Wright
- Obesity and Depression
- OC 9/11 Truth organizer threatened
- Occupy Corporatism
- october surprise
- Of Interest
- Ofcom
- Office of Public Prosecution to face child sex abuse
- Ohio criminal David Raynard aka g7w
- OIC says Nigeria abduction ‘barbaric’ – Boko Haram a Jewish Terrorist puppet regime
- Oil is NOT a 'fossil fuel'.. it can never run out
- Oil is Not a 'Fossil' Fuel – Origins of Oil
- Oklahoma City bombing False Flag attack tapes missing says FBI
- Oktoberfest Was Invented by Jews
- Oldest coins were Greek
- Oldest Pyramid is in Greece not Egypt
- Oldest Recipe Found in Egypt Written in Greek
- Oldest soccer ball in the world found in Greece
- Olympics 2024 Paris
- Oneflare.com.au spam
- Only a free Press can root out corruption
- Oogy: The Dog Only a Family Could Love
- open your eyes
- Operation Paperclip
- OPPT Courtesy Notice – Success Stories
- OPPT UCC filings
- OPRAH SAYS "IT FEELS GOOD TO BE MOLESTED AS A CHILD & IF DONE RIGHT THE CHILD SHOULDN'T REMEMBER"
- Oregon Man Sentenced To Jail For Possession of … ILLICIT RAINWATER!!!
- Oregon Shooting Exposed: another staged terror shooting by the Jew World Order
- Organ Donor truth
- Organ trafficking: Rabbis arrested over massive crime ring
- Organised Crime and Real Terrorism looks like
- origins of the Jewish German Swastika
- Osama Bin Laden hired by the CIA
- Osama bin laden neighbors say there's no way he lived there
- Osama bin Laden: Closing the Case on an Innocent Man
- Our Governments are drug dealers
- Ozemite supports Jewish Terrorism
- Paedophile group crimes against fathers exposed
- Paedophile Peter Nolan
- Paedophile rings protected by police and politicians in Australia
- Pakistan animal cruelty
- Pakistanis caught eating dogs
- Palestine Gaza News
- Palestine Genocide
- Palestine Holocaust
- Palestine is Greek not Arabic or Jewish
- Palestine news
- Palestinian Child Kicked by Border Police in Hebron
- Palestinian children used as sex slaves and human experiments
- Palestinian civilians escaping Gaza being hunted down.
- Palestinian Holocaust by the Jews continues
- Palestinian Holocaust lookout
- Palestinian Journalists targeted in Israeli attack for exposing the truth
- Paltalk racist user – Cups_of_Kiwi
- pandemic
- Papal and Crown Officers Ordered to Stand Down by Court
- PAPER INDUSTRY and more
- pappas-xasisi ipie kai o theos
- Paralyzed Puppy Thrown in a Trash Can Gets Rescued
- Paris Hilton a crypto Jew
- Paris Jewish mayor joins calls to ban comedian
- Paris staged terror
- Parkland High School Shooting – banned video
- Parliamentary debate on RSPCA prosecution issue scheduled
- Parramatta Council corruption
- Parramatta Shooting: another staged terror attack in Australia
- parti quebecois
- passengers
- PASSOVER
- Passover is the Jewish celebration of murder
- pastor's wife turns him in after finding 'tens of thousands' of child porn files on his computer
- pathological Jewish liar and all the others like him!
- Patton On Communism And The Khazar Jews General Patton's Warning
- Paul Keating Necrophilia
- Paypal billionaire Peter Theil
- Peace Maker Society Interview/HIRING LOCAL PEOPLE WORLDWIDE VIDEO!! (APPLY NOW Worldwide)
- peace noble prize
- pedal cars
- pedal power
- Pedigree DentaStix for dogs made in Hungary
- Pennsylvania Judge Sentenced For 28 Years For Selling Kids to the Prison System
- Penny Auction scams
- Pentagon lecturing on vaccine designed to disconnect human soul
- Peodophile group crimes against fathers
- Peodophile ring crimes against fathers
- Peoples reaction to Margaret Thatchers death
- PEPSI USING ABORTED FETAL CELLS IN SODA FLAVORING
- Perouse Services Pty Ltd
- Personating public officers of the crown
- Perth Radar Detector Shop exposed
- Perth Western Australia
- Perth Western Australia – radars.com.au
- Pet friendly policies in rental properties
- PETA kills more than 95 percent of pets in its care
- Peter Alexander Thomas – Dog cruelty case shock
- Peter Andrew Nolan sex offender
- Peter Andrew Nolan talks about harming his wife and children with one blow
- Peter Garrett the Zionist puppet
- Peter Nolan
- Peter Nolan
- Peter Nolan banned in facebook Political Groups
- Peter Nolan domestic violence offender
- Peter Nolan exposed
- Peter Nolan psychopath
- Peter Nolan slanders his victims
- Peter Nolan sociopath
- Peter Nolan victims
- Peter Nolan You grubby grubby turd!
- Peter Nolan you've had your ass kicked every time
- Peter Nolan's crimes against fathers child porn ring
- Peter Nolan's crimesagainstfathers.com
- Peter Nolan's family law court
- Peter Pan the Neverland pedophile
- Peter Sellers Freemason
- Peter Williams QC New Zealand Drug Lord Paedophile
- Petrea King and Quest for Life Foundation in Bundanoon is another charity scam
- Petrol Price Fixing Cartel in Southern Highlands NSW
- Pharmaceutical Industry will not cure you
- pharmaceutical/medical industry suppress knowledge of any cures for profit
- Philadelphia Experiment
- Philadelphia Marijuana Activists Due in Federal Court this Week
- Photo of Man Punching Dog: Real or Hoax?
- Physicists Find Evidence That The Universe Is A 'Giant Brain'
- Pieta Morgan – no justice in QLD
- Pig rescues baby goat
- Pilot admits the Earth is flat
- Pine Gap laser weapons testing
- Pine Gap military weapons testing
- Pirates of the Suburbs – Councils Destroying Communities
- Pitbull saves 2 women from cobra attack
- Planet Earth Ascension 2012
- Plastic Jews
- Please do not leave your Pets outside
- Please get "Sergeant Bansect" OFF the market
- Plutonium From Japan In Europe Now
- PM Tony Abbott the criminal Jew
- poisoning rain water
- Police Abuse
- Police are not Government
- Police corruption
- Police crime
- Police Fraud: Re: Driver License Fraud
- Police Left K-9 Dog Unit in Car Until it Died
- Police Officer In Court On Animal Cruelty Charges
- Police officer shot dead after pointing stun gun at man’s dogs
- Police Prosection
- Police Scotland ask are you a freeman on the land
- police state
- Police think Sovereign people are Militants
- policies
- policy
- Polio Vaccinations Are Now The Number One Cause of Polio Paralysis
- Polish Jews killed tortured raped 15 million German civillians
- political
- politician
- Politicians stay away from Vaccines
- Politics
- Pompeii and the Jews that love Penis
- Pompeii the Jewish city of the penis
- pope
- Pope Benedict XVI
- Pope's decree about to cause mass resignations?
- Popular flea collar linked to almost 1700 pet deaths. The EPA has issued no warning
- Pornographic Material downloaded inside the Vatican
- Pornography sex slaves prostitution… Why are these businesses dominated by Jews?
- Port Arthur Massacre
- Port Arthur massacre – false flag attack – How Australians lost their gun rights
- Port Arthur Massacre false flag operation
- Pot 'cured' brain cancer
- Poultry Industry
- Poverty is caused by Zionism. Eliminating Poverty does not make money for Zionist Jews
- power
- power generation
- PP Pet dog killers
- Pr Chris Busby attacked for telling truth about Weapons Radiation & Remedies
- Pratt Foundation
- President Kennedy declared war on Rothschild's Federal Reserve Bank
- President Lincoln
- presidential
- Presstv
- Pretend Law
- pretend laws
- Prevent Disease
- Prime Minister Julia Gillard's salary to overtake US President Barack Obama
- Prince Andrew Pedophile is pictured inside pedophile Jeffrey Epstein’s £63million mansion
- prince charles
- Prince Harry at home among Jewish terrorists
- Prince William visits Jerusalem tomb of his great-grandmother Princess Alice
- Princess Diana found Alive
- Princess Diana’s Death and Memorial
- PRINCESS KATE TO END UP FEATURED ON PORN SITE?
- Princess Margaret nymphomaniac
- Princess of Wales and Dodi Fayed
- Printer cartridge scandal investigation
- Pro-Assad Rallies Held Across Syria Ignored By Media
- Producers of toxic BPA are now boasting $8 billion in sales for 2012
- Product Reviews .com.au
- Professor From Berkely College Says: People Do Not Die From Cancer! People Die From Chemotherapy And In Terrible Pain!
- PROJECT CAMELOT BILL WOOD
- Project Camelot interviews Dan Burisch UFO/alien phenomenon
- Prominent Australian entertainer arrested in relation to Jimmy Savile child sex investigation
- Prominent Zionist Vic Alhadeff sacked
- Promoting democracy behind dirty motives
- proof Catholic Church are Zionists
- PROOF Elite Jews Steal Hundreds Of Billions Using Fake Companies
- Proof Israel Jews sniping semite palestinians again
- Proof of Hamas fireworks compared to israeli rockets
- Proof that Christianity Is a Supernatural Method for the Jews to Enslave the Goyim
- propaganda
- Prostate Cancer Cured with Cannabis Oil
- Prostitution and Prejudice: The Jewish Role in Human Trafficking
- Protecting USA Banker's POPPY FIELDS in Afghanistan
- Protein Content of Green Vegetables compared to Meat?
- Protocols of learned elders of zion
- Psychiatrist of Israeli Prime Minister Benjamin Netanyahu Commits Suicide
- Psychiatrists assist Fraud in the Killer Family Courts by John Aster
- Psychic Detectives Have a Perfect Record
- PSYCHIC DETECTIVES POLICE CONFIRM PSYCHICS’ AND MEDIUMS’ GIFTS
- Psychopathy and Jews
- PTSD
- Public editor
- Public housing
- Purim – Jewish Blood libel
- Purina Lucky dog biscuits GMO grains and cereals
- Purple Tesla Energy Plates – Genuine Healing and Energy Plates and Jewelry
- purpose of education
- putin
- PUTIN – just another oligarch Jew
- Putin Foils The Jews In Syria
- Putin is a Jew
- Putin is Jewish Pawn says Russian Patriot
- Putin's Jewish Parents
- Pyramids
- PYTHEAS – THE GREEK EXPLORER WHO DISCOVERED BRITAIN
- Qantas
- qatar
- QLD owned by USA shareholders
- quadracycle
- Queen Elizabeth II House of Saxe-Coburg and Gotha "Windsor"
- Queen Elizabeth's Druid Ritual
- Queen escorted by Secret Society Nurse
- Queen Victoria
- QUEEN’S 2015 CHRISTMAS BOMBSHELL MESSAGE: 'ENJOY YOUR FINAL CHRISTMAS'
- Queensland Police Commissioner Ian Stewart
- Queensland police tied to major drug trafficking
- question
- QuiBids.com – Penny Auctions
- Quran
- Rabbi A. Romi Cohn has sucked 25000 baby penises
- Rabbi A. Romi Cohn has sucked 25000 baby penises – “it’s a joyous occasion”
- Rabbi Admits Israel did 911
- Rabbi admits the Holocaust is a Myth
- Rabbi admits to stealing millions from special needs school
- Rabbi admits: Islam is Israel's broom.
- rabbi Alan Jones the pedo arrested again
- Rabbi Alon Anava exposes the Jew World Order
- Rabbi circumcision sick ritual
- Rabbi explains who controls the world
- Rabbi Mordechai Rosenberg
- Rabbi on plane wears body condom to protect himself from Gentiles
- Rabbi revealed as key suspect in alleged baby trafficking ring
- rabbi vomits and assaults black lady with bottle to the head.
- Racism in Australia jewish made
- Racist Ashkenazi Jews in 1950’s Israel eugenically irradiated non-European Jews under guise of treating ringworm
- Radar Speed gun accuracy doubts
- Radiation treatments create cancer cells 30 times more potent than regular cancer cells
- Radical islam = crypto jews
- Radical islam is not islam
- Radio host Howard Sattler suspended after asking Julia Gillard if partner Tim Mathieson is gay
- rage
- Rail Guns and Laser Cannons
- RAJU the elephant who stole the world’s heart when he was seen crying when shown freedom after 50 years of brutal treatment
- Ralph Nader
- rape
- Rape of Iraqi Women by US Forces as Weapon of War
- Rats mice and cockroaches discovered by inspectors lurking in dirty NHS hospital kitchens
- Rawson Homes illegal fence
- Rawson Homes Review
- Rawson Homes Shonky Builders: Geoff Hanratty
- real animal charity
- real estate
- Real estate economics
- Real Jews are black
- Real Libyans rally for Gaddafi
- REAL NAZISM FROM THE REAL NAZIS
- REAL Reason USA Wants to Attack Iran -The Kaspian Gas Pipeline !
- Reason
- Reason Foundation
- Reason why your Government wont win the war on drugs
- Red Cross Raised $500M for Haiti but Built Only 6 Homes
- Red Cross Zionist Jews
- Red Heifer sacrifice
- Red Mafia are jewish
- Red Meat a Ticket to Early Grave – Harvard Says
- Red meat myths
- Religion
- religious violence
- Remember when the virus hunted down the unvaccinated?
- Remembering the Armenian Assyrian and Greek Genocides.
- Rense & Celente – Criminals Own The Government
- Rense & Rosa Koire – Agenda 21 Eco Terror War
- Report finds Jews descended from Turks
- Reporter Admits All the News is Fake!
- Reptilians are real
- Reptilians mummified remains
- republican
- Republicans
- Reputable Cheap Online HongKong Store
- Rescind a Traffic Ticket
- Reserve Bank of Australia
- Reserve Banks is owned by private Jewish banks
- Retired Police Captain demolishes the War on Drugs
- Revolution: It's Time To Rise
- Rhodes scholarships = Nathan Rothschild
- Rich Jews brainwashing Christians to blame the Muslims
- Rigged Australian Elections
- Rigged USA – Australian Elections exposed
- Rigged USA Elections exposed
- right!
- Rik Clay – Olympic 2012 Zionist Jewish Satanic Symbolism
- Ringling Bros circus animal cruelty
- RIP Michael Hastings.
- Road Refresher Non Spill Dog Water Bowl – Beware of Styrofoam
- Road Toll Dodger Santos Bonacci The Uncensored Truth
- Robert Borsak
- ROBERT EDMONDSON: “I TESTIFY AGAINST THE JEWS”
- Robin Williams got tired of his own bullshit. Preliminary Cause of Death Is "Asphyxia Due to Hanging"
- Robyn Speerin
- Rockefeller GLOATS About 9/11 in 1967!
- Rolf Harris arrested in UK sex scandal police investigation
- Roman Catholic
- Roman Catholic Jews created islam
- Roman Catholic Vatican Jews kill 68 million innocent people
- Ron Paul
- Ron Paul – sells out to the zionists – Endorses Israel's Attack on Iran
- Ron Paul on CIA Drug Trafficking
- Ron Paul: Israel created Hamas to counter Arafat
- Ronald Reagan dedicated the Space Shuttle Columbia to the Taliban
- Ronald Reagan says: Taliban 'moral equivalent of America's founding fathers'
- Ronan O'Gara refuses to shake the hand of Liz Saxe-Coburg Gotha ( Queen Elizabeth II )
- Rosacea & Acne Cure that works
- rose garden
- Roseanne Barr exposing the Holocaust
- Roseanne Barr Speaks out about the Jewish MK-Ultra in Hollywood
- Roseanne DROPS A BOMBS- Vatican- 911 -House of Saud- Rothchild – REVOLUTION TIME
- Rotary power
- Rothschild and family ties with British Zionist Royalty
- ROTHSCHILD CONTROL OF RAW MATERIALS
- Rothschild Family Net Worth 2024 (FORBES) $500 Trillion
- Rothschild Halloween Party
- Rothschild in Russia
- Rothschild inbred to keep the family blood
- Rothschild killing islamic banks and economies that charge no interest
- Rothschild's World Currency drives the World's slavery system
- Rothschilds & Goldman Sachs Destroying Greece again
- ROTHSCHILDS AND ZIONISM
- Rothschilds One World The Only World Power
- ROTHSCHILDS: PAPAL & ROYAL KNIGHTS
- RoundUp
- Roundup Found in All Urine Samples Tested
- Roundup weed killer toxic killer
- Royal British Family German Jews of illuminati
- Royal Prince Alfred Hospital Foundation fraud
- Royal Rothschild bloodline of demons
- RSPCA Australia NSW Yagoona 2011 finance report
- RSPCA £115m… isn't enough to rescue a tortured dog?
- RSPCA ‘Freedom Food’ pigs gassed to fall into line with cruel meat industry
- RSPCA boss Dr Peter Wright – accused of animal cruelty
- RSPCA charity scams
- RSPCA corruption
- RSPCA cruelty
- RSPCA did nothing let Patrice Raymond starve dog to death
- RSPCA do NOT protect animals they KILL them
- RSPCA exposed
- RSPCA free range scams
- RSPCA in bed with the Animal abusers
- RSPCA is a Corporation
- RSPCA is a Corporation not a charity
- RSPCA kill everything they rescue
- RSPCA kill not save
- RSPCA kill rate data for 2012-13 all states
- RSPCA kill rescued animals
- RSPCA killed 1160 animals out of 1200 dumped on Christmas / New Year
- RSPCA killed 43 cattle – RUTH DOWNEY
- RSPCA kills needlessly
- RSPCA neglect calls as more animals keep dying.
- RSPCA neglect horse cruelty for years
- RSPCA NSW 2011 finance report
- RSPCA NSW 2014 Financial report total $94.5 million
- RSPCA promotes meat industry and live exports
- RSPCA refuses TV debate
- RSPCA responsible for the death of my elderly cat
- RSPCA scams
- RSPCA scandals
- RSPCA shocking admission
- RSPCA Shot Ruth Downey's Nursing Cows leaving the Calves to starve
- RSPCA staff been paid an extra $14 dollars a day if they “euthanise” an animal
- RSPCA trustees 'broke charity rules' again
- RSPCA unkind to animals
- RSPCA won't drop pig abusers
- RT “Accidentally” Busts Assange and Wikileaks as CIA Front
- RT.com
- Rudozem Street Dog Rescue
- Rule of Law
- Run from the cure – hemp medicine
- Rupert Murdoch ashamed of his Jewish origins
- Rupert Murdoch Jewish Owner Of Fox News Behind Blackmail Vaccination Push In Australia
- RUPERT MURDOCH'S JEWISH MOTHER. SCHOOLING. ZIONIST ROOTS. ISRAEL. ADL. WTC. 911. ETC.
- Rupert Murdoch's Jewish origins
- Rupert Murdock iTV hacking
- Rush Limbaugh
- Russell Brand the zionist
- russia
- Russia Issues International Arrest Warrant For Rothschild Henchman & Leftist Savior George Soros!
- Russia Targets criminal Jewish Tycoons
- Russia Today Declares 9/11 Was An Inside Job!
- Russia wins
- Russian Jews and Chernobyl false flag attack
- Russian Jews – Natural Born Killers
- Russian Mafia are Jewish
- Russian Military Arms Expo 2013
- Russian Mink fur farm
- Rutgers students face “bias” probe for flyers criticizing Israeli home demolitions
- Saint Francis
- Saint Peter's Square
- salvation
- SALVATION ARMY CONVERTS TO ZIONISM
- Sam Childers – Machine Gun Preacher
- Sam iliadis the council scumbag
- Same Crisis Actor Interviewed at LAX Shooting and 9/11 Twin Towers
- Sami Tolvanen conman
- san francisco
- Sanctions
- Sandy Hook Actors Laura Phelps Exposed as Jennifer Sexton Greenberg
- Sandy Hook Redux: Obama officials confirm that it was a drill and no children died
- Sandy Hook School Shooting hoax
- Santa Ana Police raided a pot dispensary and then ate the edibles.
- Santa Barbara Shooting Hoax Blown WIDE OPEN:
- Santos Bonacci interview after court 29/01/14
- Santos Bonacci outside court Melbourne Australia April 1st. 2014
- SARTRE Commentary
- Satan & 58 dollar scam (Benny Hinn & Mike Murdock)
- Satan At The Wailing Wall
- Satan's chosen people
- Satanic Freemasons
- satanic jews
- Satanic Jews Vandalized Catholic School
- Satanic Ritual Sacrifice On An International Scale
- Satanic Rothschild
- Satanic Vatican Jews
- Satanic Vatican Jews – The illuminati hierarchy
- satanic zionist freemason 2012 Olympics
- satanism
- Satanism in the Vatican
- Satellites have balloons
- satire
- Saudi Arabia Jews supply Anti-Aircraft Missiles to Mercenaries (CIA Mi6 SAS Mossad Al-Qaeda) in Syria
- Saudi Royal Family are Jewish! King and Prince are all Jews
- saudi-arabia
- savagely beat them'
- Save your seeds before Monsanto controls them.
- scams
- Schapelle Corby an innocent woman sacrificed by Australian Government
- Science
- Science & nature
- Scientists now they admit sunlight can prevent skin cancer
- Scientists reveal Jewish history's forgotten Turkish roots
- Scientists reveal Jewish historys forgotten Turkish roots
- SCIENTOLOGY Child Labour Camp in Australia 2012
- SCOTLAND THE LAND OF THE GREEKS
- SCOTLANDS ELITE PAEDOFILE RING . HOLLIE GREIG
- Sean Dix
- Seasonal adjustment
- SeaWorld jews
- SeaWorld slavery system
- Secret CIA Human Experiments in the United States: MK-ULTRA Mind Control
- Secret Service killed JFK here's video to prove it
- Secret Service party Cocaine and Prostitutes
- Secret Sex Life of the Jews
- Secret Underground Highway Systems Spanning the Entire USA
- Secret War In Space – NASA Coverup
- Security News
- sedition
- Senate Bill S510
- Senate Bill S510 Makes it illegal to Grow
- Senate Terrorism Subcommittee
- Senior British rabbi filmed telling alleged child abuse victim not to go to the police
- Sept. 2012
- Serbia
- SES Volunteer saves accident victim
- Sevim Dagdelen
- Sex for Secrets
- Sex offender register 'will protect kids'
- Sex Slaves – Israel/Palestine
- Sex Slaves – Italy
- SEX SLAVES IN ISRAEL
- Sex Trafficking Inside the UN With Ties to the U.S.A State Department
- Seymour Park Moss Vale dog park
- sgs
- SGT. CHARLES L. JONES
- Shadow Government Statistics
- Shakespeare had a hand in writing the Bible for the Jew World Order
- She had three layers of wire wrapped around her neck and one eye was blinded by someone
- She was dumped with tape on his mouth and broken legs and left to end in pain due to human!
- Shell's pedophile network
- SHOCKING SECRET HIDDEN BY FREEMASONS TO PROMOTE FAKE JEWS
- Shocking true case of Adam Greenwood’s battle with Bowral’s “Shady Bunch” protected by dodgy NSW Police cops & John Barilaro’s mates
- SHOCKING TRUTH ABOUT CEREAL EXPOSED
- shoebat.com is a Jewish website against muslims
- shooting
- shoppingsquare.com.au email spam
- Shortages of food means more fear and panic for the goyim
- Shows the depravity of the jewish USA military “detainees were RAPED”
- Shrimp: The Disgusting Truth
- Shut Up JEW – Goyim TV
- Sick claims by israelis on social media that photos of Palestinian boy’s brutalization were faked
- Sideviews
- Significance of the Papal Decree
- Silver Well Generator and Magnetic Stirrer Kit
- Simon Wright
- Simpsons did it again
- Sir Noël Peirce Coward homosexual
- Six Jewish Companies Control 96% of the World’s Media
- skanky jews sleazing down america
- Skin Cancer is not caused by the Sun
- Skin Cancer scams
- Slavery
- Slobodan Milošević
- Smarter Farming
- SMH poll about alternative medicine was rigged
- Snoop Dogg Against Vaccines
- Snowden is a CIA fraud
- Snowden israel puppet
- Snowden Psyop Hoax
- So Are All Jewish Leaders Criminally Insane?
- Social Media
- Social Services trafficking children and eating babies
- soetoro
- Somali rebels = CIA puppets
- Someone Threw Her Off The Roof Leaving Her Paralyzed And Drink Rain Water To Survive
- Sophia Stewart the 'Mother of the Matrix' drops the truth bomb: Facebook is a CIA database
- soros
- SOS – QUAKE ALERT – HAARP ON FULL POWER – Be Prepared
- Soul Pattinson Chemists own this coal mine
- Sour Sop Cancer Cure
- SOUTH AFRICAN JEWS MOVE TO WESTERN AUSTRALIA.
- South Korea animal cruelty
- South Korea dog meat trade
- Southern Highlands criminal Michael John Darby of Berrima Communications
- Southern Highlands daily chemtrails
- space
- Space based weapons
- SPACE IS SO FAKE
- Space Station hoax!
- Space Travel hoax
- Space Wars – Project Puma Punku
- Spamhaus.org claiming cyber criminals running this website
- spanish animal cruelty
- Spanish BullFighters are pure scum
- special programs in Israeli kindergarten
- Speech from The Hon Bill Shorten MP addressing the Zionist Federation of Australia
- Speech Jamming technology
- Spielberg's Holocaust Hoax
- spirit cooker Marina Abramovic
- Squirrel returns the favor
- sraeli Government started off as a terrorist organisation killing the British in Palestine
- St Patricks College dundas nsw
- Staged CNN Syria Interviews Faked By CIA MI6 Activist Danny
- staged event
- Staged Refugee Crisis by the Jews to bring in more Muslims into Europe
- Staging the news
- Stan Meyers water powered Buggy
- stargate technology
- state
- state department
- State of Victoria – Department of Justice ABN 32 790 228 959
- states
- Stay alert boys
- Stephen Glover the Sydney Gay Jew
- Stephen Lendman
- Steven D. Kelley – Underground City at the Getty Museum
- Steven Seagal Loves Putin and Might Become a Russian Citizen Because of Ukraine
- Steven Seagal: I believe a lot of these mass murders (with Guns) have been engineered
- Steven Seagal: Obama Jewish regime very good at controlling media
- STEVEN SPIELBERG boston bombing production
- stone used to build the temples in the ancient Greek city Selinunte
- StoneHenge hoax
- Stop eating Pork Bacon
- Stop Fracking for gas
- Stop vaccinating your children.
- Stop wolf pups from being gassed buried alive and killed with metal hooks
- Street Kids Murdered by Brazilian Police Ahead Of the World Cup 2014
- Studies Show Psilocybin Mushrooms Can Cure Anxiety Depression and Even Regrow Brain Cells
- Study of Jewish Population Reveals New Schizophrenia Mutation
- Study of Psychopathy among Jews
- subversion
- SUCCESSES OF THE OPPT COURTESSY NOTICES
- Suez Canal
- Suicide bombers were invented by the Jews.
- Suing the Government for Negligence: The Federal Tort Claims Act
- Sunglasses Cause Cancer
- SUNSHINE COAST FRACKING FILMS & FORUM
- Super Powers pretending to be enemies in the public eye to keep themselves in power.
- Super-Soldier "Rachel" (Black Goo)
- Superannuation is just another money scam by the Jews
- Supermarket meat
- suppressed energy secrets
- Surf Life Saving Australia has a lot to answer for
- Survey scams
- suspicious deaths and suicides with links to the Westminster Jewish paedophile network
- Swan Hill Police attack and attempt to kill an unarmed man for refusing to allow entry without a warrant and steal a baby without cause.
- Swastikas Hate Graffiti Found on Brooklyn Synagogue & Stores by Jews
- Sweden set to punish Israel’s Palestinian victims
- swing
- Swisse Men's Ultivite crap
- Sydney Abattoir closed after animal cruelty footage
- Sydney Australia exposed
- Sydney Festival 2012 celebrations
- Sydney Kings Cross Police Station was raided because they were protecting a pedophile ring
- Sydney Martin Place CBD siege inquest: What role did ASIO play?
- Sydney siege inquest: What role did ASIO play?
- Synagogue of Satan Jewish Ritual Murder MASSONERIA talmud kabbalah 11_24
- Synthetic Forests. GE trees
- Syria
- Syria – The CIA and NATO Exposed
- SYRIA civil unrest by CIA
- Syria News
- Syria under attack by Jewish World Order
- syrian army
- Syrian Electronic Army = CIA
- Syrian families shot dead by CIA Mossad snipers
- Syrian Girl – Why Al Qaeda is Al CIAda
- Syrian Jews want Assad dead
- Syrian people want the Jewish Terrorists posing as rebels to leave
- Syrian Women confronts the network and calls them Al Jew-zeera
- Syrians Stay to Keep Warm in Tents While Obama Sends Warm Clothing for Al Qaeda
- Systematic Israeli State Terror
- taliban
- Taliban became bad guys when they started burning the Jewish Drug Lords crops in 2001
- Talmud Style
- Talmud Torah Quotes
- Talmudic Jews – The Children of Satan
- Taman Safari Indonesia Bogor animal cruelty
- taser resistant outfit
- Taurine an ingredient in Red Bull originally came from bulls.
- tax
- Tax cuts and subsidies for the zionist industries and corporations
- Tax Hero: Tommy Cryer Passes at 62
- Tax Payers fund Jewish Government Organised Crime
- taxes
- taxpayer
- tcgindustrial.com.au exposed!
- Tech Gadgets
- Tech News and Gadgets
- Techrific Australia – Reputable? not a chance!
- Teenage painter praised for extraordindary talent.
- Tel Aviv trumps Jew York to be named world's best gay city
- Telstra/telecom/bigpond tells family internet fault would take 14 years to be seen to
- Ten Years on a Chain: Rescued Dog's Happy Ending
- tephen lendman
- terror
- terror wars
- Terrorism is created by the Jews
- Terrorism Isn’t Real
- terrorist
- Terrorist “Jewish Defence League” Attack Supporters of Anti-Jew Comedian Dieudonné in Paris
- Terrorist group crimesagainstfathers.com
- terry kenney
- TESLA'S PURPLE ENERGY PLATES
- Texas Town Fires Police Dept. Hires Private Citizens For Security — Guess What Happened to Crime?
- Texe Marrs Hunts Jews and other Devils
- TGC Industrial scams
- Thailand Dog Meat Trade
- ThanksGiving just another Kosher fairy-tale for the sheep
- THC (marijuana) Helps Cure Cancer Says Harvard Study
- The 13 illuminati Satanic Jewish bloodlines
- The 13 Most Evil U.S.A Government Experiments on Humans
- The 4000 year old Ancient Greek Minoan Aqueducts.
- The 50 Most Influential Jews – Not a single humanist on the list
- The 528 Hz Frequency
- The 911 Rockefeller ritual in 1967
- the 9th circle ritual cult of jews
- The Abandoned Dog
- The ADL was founded by Pedophiles
- The Al Jazeera & Israeli Deception
- The Ancient Greeks Invented the Hanukkah Menorah
- The Ancient Name for Scotland has a Greek Connection
- The Animal Rights and Rescue Group (ARRG)
- the anti-Semitism trick
- The AntiChrist
- The ANZAC lies
- the art of Jewish false flag attacks to start wars
- The Australian carbon tax will be paid to the United Nations
- THE AUSTRALIAN ELECTION WAS A FRAUD
- The Australian Tax Office admit “not a legal entity”
- The Australian who helped create Israel
- The “Jews” Are Not Jews But Are Khazarians
- The ‘Free Syrian Army’ is a CIA-MI6 intel op
- The Baruch Plan for Jew World Government
- The Benefits of Hydrogen Peroxide and it’s Many Uses
- The Bible and its true meanings
- The Bible's oldest text teachings came from the Greeks not from Hebrew
- The Big Bang Theory star Mayim Bialik donates to Jewish Terrorists
- The big picture: Projection screen basics
- The Birth of the Cabal / Zionism
- The Black/African Holocaust 100 million killed by the Jews
- The Bohemian Grove
- The Book of Codes THE SECRET IS OUT
- The Book of Hebrews does not contain the word Jew.
- The Book of Maklumat
- The British and American Deception 1 – From Iraq to Iran
- THE BRITISH ARE USING GURKHAS IN LIBYA TO TERRORIZE LIBYANS
- THE BRITISH MONARCHY AND THE COMMITTEE OF 300 illuminati members exposed
- The British Royal Family of fakes
- The British Royals NAZI Jew bloodline
- The Budget scam
- The Bundy Bloodline – Families in the world who are allied with the Illuminati
- The Canadian army showing off their epic skills again
- The cancer industry's war on cancer cures
- The Cancer scam
- The Car that Runs on Water: Release to The People October 2013 — NOW!
- The CDC has been manipulating ICD codes on death certificates to conceal the fact that covid vaccines are a common cause of death
- The CFR and the RIIA Jewish roots
- The Child-Rape Assembly Line
- the Chinese pig that escaped slaughter
- The CIA – Criminal Israel Agency
- The CIA throwing unwanted CIA agents under the bus again
- The Committee of 300 governs the world via a three city state empire
- The Commonwealth Bank financial planner scam.
- The Corporation — Commonwealth of Australia
- The Corporation — Part 1 Corruption in Australia
- The Coverup of Zionist Jewish Organized Crime!
- The Coverup of Zionist Organized Crime!
- The COVID-19 Vaccine Program Violates the Nuremberg Code
- The Crimes of Israel – Eustace Mullins
- The crimes of the Nazis in Greece: Part two
- The criminal Jewish system
- The CrossRoads Group
- The CrossRoads Group in Moss Val
- The CrossRoads Group Moss Vale scams
- The Crying Bull
- The Dalai Lama – fraud
- The Dalai Lama – killer of Tibetans
- the day Australia died
- The DC Sniper Another Government False Flag
- The deliberate manipulation of our food system
- The dentistry holocaust: How America has been mercury poisoned by an industry in denial
- The Destiny Of America
- The Diary of Anne Frank is a Fraud
- the dog that been shot and buried and lived
- The Dunblane School Massacre That Changed Gun Law in Britain
- The Early History of the UCC
- The Early History of the uniform commercial code
- The Edomites – todays Jews
- The Elite Are Concerned With "The Massive Global Political Awakening"
- The Eupalinus Tunnel located on the Greek island of Samos
- The Euro & satanic symbolism
- The Europian Union = UN = Bilderberg group = Nights of Malta = Satanic Vatican Jesuits
- The Expulsion of Jews Throughout History
- the failing Holden Car industry
- the fake drug war
- The father of Elon Musk Who Fathered A Baby With His Stepdaughter
- The FBI's Assembly-Line Provocateurs
- The FDA And The Drug Companies Are in Bed Together
- The Fed's Pipeline To Israel
- The first Jesuits were Jews
- The First Nosejob In Modern Human History
- The Forensic Evidence Against The "Holocaust"
- The Forgotten Jewish Pirates of Jamaica
- The Fossil Fuel hoax
- The Gadhima Hindu ritual sacrifice
- The Gambinos… Jewish First Family of Crime
- The Genocide of 15+ Million Germans by the Jews
- The Gentle Barn Foundation is home to over 130 animals rescued from abuse neglect and slaughter.
- The Gift of Prophecy
- The Golden Ratio (Φ = 1.61803) in the dimensions of the Parthenon
- The Good Old Days
- The Government sells many of the 700000 kids that go missing each year – THAY ARE NOW SEX SLAVES FOR THE ELITE!
- The Greek 'Tessarakonteres' – one of the largest human-powered vessels in history.
- The Greek Connection of Ancient Druids
- The Hemp & Cannabis Foundation
- THE HIDDEN EMPIRE
- The Hidden Hazards of Microwave Cooking
- The Hidden History of the Incredibly Evil Khazarian Mafia known as the Jews
- The Hidden King of England
- The Hidden Reason To Attack Iran
- The History of the House of Rothschild
- The History Of The Illuminati
- The Holocaust & Genocide of the Semite Palestinian women and children
- The Holocaust hoax
- The Holocaust Hoax Exposed: Debunking the 20th Century's Biggest Lie
- The Holocaust is the biggest lie in the history
- The Holocaust Unveiled
- The Holodomor was a GENOCIDE committed by Jewish Bolsheviks
- The Holy Bible created by Zionists
- The Horrific New World Order Master Plan that has full UN approval
- The Hypocrisy of Buddhism
- The Idaho Department of Fish and Game killing wolves
- The illumati 2-the antichrist conspiracy
- The illuminati hierarchy
- The Illustrated Protocols Of Zion
- THE INTERNATIONAL JEW THE WORLD'S FOREMOST PROBLEM
- The International Jew The World's Foremost Problem.
- The Invention of the Jewish People
- The Invention of the Jewish People [Paperback]
- The IRA Jews
- THE IRISH CONNECTION TO THE GREEK TRIBE OF DAN
- The Irish Slave Trade – The Forgotten 'White' Slaves
- The Irish Tuatha Dé Dannan Connection to the Greek Tribe of Dan
- The Islam & Catholic Connection
- The Israeli “StopTheRockets from Gaza Myth”
- THE ISRAELI CEO OF TAVISTOCK
- the jesuit vatican new world order
- the jesuit vatican world order
- The Jew as World Parasite 1944
- the Jew Media octopus
- The Jew Who Rule America and the world
- The Jewish Attack On The Western World
- The Jewish Bilderberg club
- The Jewish Blood Diamond Trade exposed
- The Jewish Burqa
- The Jewish Child-Rape Assembly Line
- The Jewish Declaration of War on Nazi Germany
- The Jewish Ethnic Cleansing Of Europeans
- The Jewish hand behind Internet – Google Facebook Wikipedia Yahoo! MySpace eBay
- The Jewish HellFire Club – Descent Into Darkness
- The Jewish History Of The House Of Rothschild
- The Jewish Mafia rules the world
- the Jewish Myth
- The Jewish Pharaohs of Egypt
- The Jewish Pirates Who Ruled the Caribbean
- The Jewish Plague
- The Jewish propaganda campaigns against Muslims
- The Jewish Psychopath
- The Jewish religion FORBIDS Jews from being honest with non Jews!
- The Jewish roots of the Saudi Royal Family
- The Jewish Supremacy exposed
- The Jewish Synagogue of Satan
- The Jewish thought police
- The Jewish Vulcan salute
- The Jewish war on White Australia continues
- The Jewish way to kill a nation
- The Jewish World Order exposed
- THE JEWS DECLARE WAR ON GERMANY
- The Jews did the scalping not the indians
- The Jews had been in England in Anglo-Saxon times dealing in slaves
- The Jews have sucked baby-penis for 5000 years
- The Jews infiltrated Ancient Greece Rome and Egypt
- The Khazarian Conspiracy The Synangogue of Satan The Fake Jews
- The Khazarian Supremacy
- The Khazars (fake jews) are the New World Order
- The Khazars are the New World Order – A Jewish Defector Warned America
- The Khazars are TURKS!!
- The King David School of Zionism
- The Knight Templars were Crypto Jews
- The Knights of Malta
- The Largest In The World
- The Latin alphabet derives from Greek
- The Lead Vaccine Developer Comes Clean So She Can “Sleep At Night” – 44 girls are officially known to have died from these vaccines
- The Leading Edge Market Research Consultants
- The Lie Of The Genetic Jew
- The List OF 75 US Senators Who Voted To Let 30000 Drones Shoot Americans
- The Lizards and The Jews [full documentary]
- The majority of news they feed you on TV is NOT real.
- The Man in Charge of the World; The Great Rothschild Exposed
- The Man Who Discovered Cancer Cause Said This …. You Will Never Hear This From Your Doctor
- The Missing Secrets of Nikola Tesla & HAARP
- The Mohel
- The Monsanto Monopoly
- The moon is a electromagnetic plasma x-ray image reflection
- The moral treason of David Icke
- THE MOST ANTISEMITIC VIDEO EVER! The Truth About Jews
- The Most Empowered Children of The Future Will Be Deprogrammed and Deschooled
- The mushroom biologist talks about the antimicrobial properties of fungi
- The NASA Space Hoax Exposed
- The Nazi Zionist Connection
- THE NAZI ZIONIST PARTY
- The NAZI Zionist Party biggest secret
- THE NEPHILIM
- The Nikola Tesla Interview Hidden For 116 Years
- The NSA Reportedly Has Total Access To The Apple iPhone
- The NSW RSPCA have funds and assets of over $73million
- The Nuclear Threat from Israeli Submarines (The Samson Option)
- The Old Testament and New Testament was originally Greek
- The Old World Order Khazar Nazi Jews
- The oldest written text discovered in Greece 9000 years ago
- THE OMEGA AGENCY
- The One People – Australia
- The opiod epidemic was directly caused by the jewish Sackler family.
- The Original Crypto Jews
- THE OTHER ISRAEL [full documentary]
- The Pagan Origin Of Easter .. ishtar
- The Pagan Satanic origins of Holy Communion
- The Panhellenic Sun A Dazzling Emblem of Ancient Greek Unity
- The Phony (Mossad) Al Qaeda Cell in Palestine
- The Plague
- The Pope / Vatican is top of the tree for all UCC – Commercial law – Cannon law for which all barristers lawyers and judges worldwide must abide
- The Port Arthur Massacre – Australian false flag attack by jewish government
- The Power of RAW Cannabis Marijuana
- The Power Of The Rothschild State: The Hijacked Name Of Jew By The Khazar Banking Cartel.
- The president of the World Jewish Congress calls world leaders to pass laws that will put antisemites in prison
- The Problem is Civil Obedience
- The PROTOCOLS of the LEARNED ELDERS of ZION exposed
- The Queen of England Deals Extensively in $17 Trillion Depleted Uranium Trade
- The Real Hebrews – Jews
- The Real History of todays Fake Jews
- The Real History of todays White Jews
- the real holocaust
- The Real Iran that USA Doesnt Want You to See
- The Real Issue Of Jewish Genes
- The real Jewish History
- The Real Story of How Israel Was Created
- The real Terrorists that Governments dont want you to know
- The Reptilian Aliens and the Council of the 13 Jewish ‘Royal’ Families
- The revelation of Italian special forces in Libya fought on the side of the rebels Special Forces
- THE REVELATION OF THE PYRAMIDS
- The Rise of Putin and The Fall of Russian Jewish Oligarchs
- The role of Jews in the making of Hong Kong
- The Rothschild Bloodline
- THE ROTHSCHILD BLOODLINE 13 BLOODLINES OF THE ILLUMINATI
- THE ROTHSCHILD DYNASTY JESUIT CONTROLLED
- THE ROTHSCHILD OCTOPUS
- The RSPCA ravages the Australian population like a wolf let loose on a flock of sheep.
- The RSPCA-NSW bought “Tradewinds Park Pet Resort
- The Ruling Elite take DMT to contact entities
- The Russian Jewish History
- The Satanic Cult That Rules the World
- The Satanic Jewish origins of NASA
- The Satanic Jewish Origins of the Ku Klux Klan
- The Satanic Rothschild
- The Satanic truth behind the Star of David
- The Saudi Royal Family are Jewish
- The Sauds royal family are actually Jews
- The Secret Jewish Network – The Making Of A Sayanim
- The Secret War in Space and Airways
- The Shocking Backroom Image Behind Every U.S.A Vaccine
- The Shocking Truth About What’s Really In Vaccines
- The Six Million Jewish Holocaust Myth busted wide open
- The So Called British “Royal Family”: They are ALL Jews!
- The Star of David/Moloch
- the state of hip-hop nowadays
- The Story of Judah
- The Story of Tania Hossack an Australian MKULTRA Subject
- The strange tale of Aboriginal slave circus performers
- The Sumerians & The Annunaki
- The Supreme Court In The US Has Ruled That The Covid Pathogen Is Not A Vaccine
- The Synagogue of Satan [Paperback]
- The Terrible Swedish Jew Killed a Million Germans
- The Third Reich Jews
- THE TONY BLAIR SCANDAL
- The translations from Greek to Arabic were not done by Muslims
- The Transvestite Congress
- The True Hebrews
- The true horrors of pet food revealed
- The Truth About Abraham Lincoln and his Rothschild family blood
- The Truth About Skin Cancer It Is NOT Caused By The Sun
- The truth about the Jews and the Third Reich
- The Truth About the Rockefeller Drug Empire
- The TRUTH about the Sun The Sun Is Hollow & Interdimensional
- The Truth and Lies of 9/11
- The Truth Behind the "Star of David"
- The Truth on Organized Crime
- The Truth.
- THE TWELVE TRIBES OF ISRAEL TODAY
- The Ugly Truth about the Anti Defamation League (ADL)
- The Ugly Truth About the Anti-Defamation League
- The UN killing machine Eugenics Murding Cult That's Killed More People Than Hitler
- The United Kingdom has not had a True Monarch since 1852
- The United Nations Exposes Chemtrails: 100% PROOF We Are Being Poisoned
- THE VACCINATION HOAX
- The video that scares racist Jews
- The word JEW is a modern invention
- The World Has been Planned out
- The World is Waking Up to the New World Order
- The World needs to take back their Countries
- The World Tomorrow Julian Assange: President Rafael Correa
- The World Will Soon Know The Truth! Darius J Wright Interview
- The World’s Most Eco-Friendly Car: It’s Made Entirely From HEMP
- The Zionist ABC's slush fund coverage is found wanting
- The Zionist BUTCHERS Behind Communism – 135 million killed by the Jews
- The Zionist Facebook lie
- The Zionist History of Gangster Bankers In America
- The Zionist Invasion of American Indian Homelands
- The Zionist Mafia that runs the World
- The Zionist Politics of drug testing in sports
- The Zionist War Dragon
- The Zionist War on Nazi Germany
- The Zionist-Satanists Cabal
- The Zionists Have No Clothes – Part 1: The Debunked Middle-Eastern Roots
- theatre of sparta in greece
- thedigitaledge.com.au
- There are no Governments only Corporations
- There are plenty of us Jewish Aborigines
- THERE COMES A ROCKET FROM GAZA ?!
- There Is No Hell Fire; Adam & Eve Not Real ––– Pope Francis Exposes
- These four Ministers stood up against live animal exports
- These Maps Prove Russian Airstrikes Aren’t Actually Targeting ISIS
- These Women Are Fighting Al-Qaeda CIA Mi6 SAS Mossad In Syria
- Thessalonians 2:14-16 – A Severe Accusation about "the Jews"
- They Bought all of Russia for $20 Million financed by NY Jews.
- They Sold The House Locked 2 Dogs Inside With Nothing To Eat And Starved For Months
- THIS 12 YEAR OLD KID HAS BIGGER BALLS THAN YOU
- This 1933 Jewish event was called "The Romance of a People.”
- This is Frankenwolf
- This is how Israel treats their own citizens who are opposed to the genocide
- This is how the jews entertain themselves.. just like they did in the Roman Jewish Colosseum
- This is how the Jews play both sides of the coin
- This is Randy Weaver of Ruby Ridge
- This is what the Jew World Order creates
- This is why Cannabis is illegal
- This is why people hate the racist Jews
- This Old House
- Thomas Edison the Evil Khazar Jew
- Thomas Edison the Jewish Fraud
- THOMAS JEFFERSON TOOK HIS OATH ON A QUR'AN
- Thomas Paine
- Thousands of Christians banned by Israel from entering Bethlehem for Christmas
- Threats emerge over Jewish engagement party in Melbourne’s inner southwest
- Three Israelis indicted for importing prostitutes from Ukraine
- Three Reasons we are in Afghanistan
- Tibetan slaves already freed in 1959 by Mao
- Tila Tequila's Brain Aneurysm After Exposing the Illuminati on The Internet
- Tim Flannery's fraud predictions about climate change for the ALP
- Tim Mathieson is gay
- Times
- Tired of Facebook (JewBook) banning you for spreading the truth – try Worldtruth.org
- Titanic deliberately sunk by JP Morgan
- Titanic sinking – No lives lost
- Titanic sunk by JP Morgan
- TOM HANKS ACCUSED OF BUYING 13-YEAR-OLD GIRL FROM HER FATHER AND RAPED HER
- Tom Hanks pedo island
- Tom Tancredo
- Tony Abbott government failed to declare six company directorships in his first year in the upper house alone
- Tony Abbott is just another criminal Jew
- Tony Abbott linked to Catholic priest Paedophile
- Too Smart To Be A Cop?
- Top 10
- top 10 breakfast cereals most likely to contain Monsanto's GMO corn
- Top 10 Important Events of Ancient Greece
- Top 10 Mysterious Police Cases Solved By Psychics
- Top 10 Zionist Lies
- Top Doctors Reveal Vaccines Turn Our Immune System Against Us
- Top Gear Car show's wheels are falling off
- Top Israeli scientist says Ashkenazi Jews came from Khazaria not Palestine
- Top Rabbi Exposes Jewish Racism!
- Top scientist resigns from post – admits Global Warming is a scam
- Top Scientist Two Time Nobel Prize Winner: ‘Most Cancer Research is Largely a Fraud’
- TopGen Energy
- Tory Councillor Caught Trying to Have Sex With an 11 Year Old
- Total Election Fraud Against Ron Paul Documented!
- Totalcontrol.com.au exposed
- Toxic Flouride May be More Prevalent in Your Food than in Your Water
- TOXINS FOUND IN MONSANTO CROPS ARE DESTROYING YOUR RED BLOOD CELLS
- Toxins in Our Blood
- Traits of a Whistleblower – by the Jew World Order
- Transportation
- treason
- TREASURY CORP OF VICTORIA
- Tree Hugger
- Tribute paid to police dogs killed in action
- tricycle
- Tristan Tottenham and Kaye Wilson-Tottenham animal cruelty
- TROPHY HUNTING AND CHILD ABUSE EXPOSED
- Troy Gentry of the country music duo Montgomery Gentry slaughters tame bear
- trucks
- true activist
- True Australian Heroes protest against criminal Jewish Governments
- True Jews persecuted by todays fake Jews for centuries
- True Muslims Sunni and Shiites are against Terrorism Wahhabi are fake Islam!
- True Prince of Wales
- Trump assassination hoax
- Trump to jail Americans for criticism of Jews
- Truth about Libya – lies of the Media
- Truth about Weed Hemp Marijuana
- Truth behind the Jewish Star of David – Star of Moloch
- Truth Hurts CNN! Feed Drops Just as US Soldier Tells Why He Supports Ron Paul
- tsunami
- TTP
- Tuffy – a dog who refused to be beaten by cruelty
- Tunisia animal cruelty
- Turkey animal cruelty
- Turkey is the true origin of the so called Jew
- Turkey is where the Devil settled
- Turkey live export animal cruelty
- Turkey will be the new headquarters for the New World Order
- Turkish Ottoman British Jews in Gaza war 1917
- Turkish secret agents responsible for forest arsons in Greece!
- Turkish Tanks keep shelling Homes after UN deadline passes as 1k people die in 8 days
- Turmeric for Dogs and Cats
- Turmeric for Pets and animals
- Turning Plastic back into petroleum
- Turns out that when the jews pick a fight with someone other than women and malnourished 6-year-olds they get their fucking ass beat
- TWIN TOWERS SECURITY OWNED BY ISRAEL!!
- Twinings Tea Australia supports the RSPCA how sad
- Twitter censors Christians
- Two Austrian politicians face punishment for telling the truth over facebook posts
- Two Jews caught stealing human eggs in Romania
- Two more babies stricken with herpes at Jewish oral blood sucking circumcision
- Two Police Dogs Die After Cop Forgets Them in Truck
- Two Reporters Fired by Fox News for Revealing Health Dangers in Milk
- Two USA states ban chemtrails
- U.N. Report Advocates Teaching Masturbation to 5-Year-Olds
- U.N.: Dozens of Muslims massacred by Buddhists in Burma
- U.S Income Tax is a fraud
- U.S. Ambassador Killing was an Inside Job!
- U.S. sanctions against Iran
- UBS Bankers sentenced to prison for rigging Forex market again
- UBS hit by $1.5 billion fine rigging Forex market
- UFO Contact – Former Canadian Defence Minister
- UFO escorted by Air Force Fighters
- UFO Nightvision Starwars Over The Planet Earth
- UFO sightings
- UFOs – Brian OLeary
- Ugly Truths About the Jewish Talmud
- UK aids Jewish group with taxpayer money
- UK News
- UK riots and US "flash mobs" being created by CIA NSA agencies?
- UK seeks end to Human Rights Act?
- UK ULEZ Camera surveillance
- UK war in Libya for oil contracts
- UK war vultures installed a cuckoo zionist identity'
- UK: 508 Dead and 297274 Injured Following COVID-19 Experimental Vaccines
- ukraine
- Ukraine activists fake clashes and fake blood
- Ukraine heroes
- Ukraine War – fake news
- Ukraine War footage is actually Beirut Lebanon
- UKRAINE: ZIONIST AMERICA’S NEW JEWISH COLONY
- Ukrainian beach club in Kyiv during the fake war
- UN Article: The Benefits to World Hunger
- UN claims Syrian CIA Mossad rebels used sarin gas
- UN corruption
- UN General Assembly
- UN Jews teach masturbation to 5 year olds
- UN peacekeeper Jews sexually abused hundreds of Haitian women & girls – report
- UN pedos in Israel
- UN Resolutions Against Israel 1955-1992
- UN Resolutions against Israel Vetoed by US from September 1972 to May 1990
- UN supplied insurgents with chemical weapons for massacre
- UN Wants World Tax To ‘Help The Poor’ cough cough!
- Uncategorized
- Understanding How Admiralty And Common Law Apply To You
- Understanding Parasitic Jews
- Understanding the Jewish Synagogue of Satan Zionism Talmudism Babylonian Cabbalism
- Undervaccinated children have better health
- Union Cycliste Internationale promote drug doping – EPO
- Unit 3 / 6 Barnett Court Morley 6062 Perth Western Australia
- united nations
- United States Apache attack helicopter following behind ISIS convoy into Syria from Iraq
- United States Department of State
- United States Secretary of the Treasury
- Unlawful Killing
- Unlawful Killing – Diana Princess of Wales and Dodi Fayed assassination by the Jews
- Unsealed flight logs show that Trump was on Epstein's private jet in 1997
- Urantia Book Online
- us
- US arming Syrian rebels with anti-aircraft missiles – report
- US flight attendant entertains passengers with comedy safety routine
- US Government ADMITS UFOs
- US Military H.A.A.R.P Facility In Exmouth Western Australia
- US Regime Change: “We initiate Terrorism to create Terrorists to invade countries and overthrow Governments”
- US$4.2 Billion
- US-Israel Relations
- USA & Israel are world’s two leading terrorist organizations
- USA – 03/22/2012
- USA admits Israel is arming and training terrorist groups in Iran
- USA Aid to Israel Jumps to $11 Million Dollars Per Day; Over $4 Billion Dollars A Year
- USA Arms Sales 2003 -2010
- USA Army singing the Israeli national anthem
- USA Backed FSA rebels Use Children to Behead Innocent Syrians
- USA bases in Australia
- USA Caught Evacuating ISIS Leaders in Iraq
- USA celebrities call for boycott of Israel
- USA funds israel $3.2 billion per year
- USA hacked 2196 Chinese networks
- USA heroes harassing killing puppies
- USA Intelligence Agencies confirm Israel did 911
- USA Jews invading middle east for control and wealth
- USA lawmakers forced to support Israel
- USA Military bases in Australia
- USA Military in Action
- USA Military is so good 90% kills are to civilians the rest is to the enemy and friendly fire
- USA NATO ISRAEL False Flag Attacks
- USA never ever landed on the moon
- USA News
- USA Shells devastate entire streets in eastern Ukrainian town
- USA soldier who throws puppies over cliffs
- USA Soldiers Raped Boys In Front Of Their Mothers
- USA spreading viruses through chemtrail rain
- USA spy drones may fly from Australia's Indian Ocean territory of Cocos Islands
- USA to Russia: Give Up or Swim in Our Sea of Syrian Blood
- USA UK Monarchy behind Fukushima radiation genocide
- USA warns Iran over threat to block oil route
- USA weapon test caused Haiti earthquake HAARP
- Using the Private Record of the Parties
- USS Cole truth
- VA News
- Vaccination MUST SEE! – The Hidden Truth – Australian Documentary
- Vaccinations are counterproductive
- Vaccinations linked to baby deaths
- Vaccine bombshell: Baby monkeys given standard doses of popular vaccines develop autism symptoms
- Vaccine Carnage In The ER – Australian Nurse speaks out
- Vaccine heart attack
- Vaccine Industry
- Vaccines
- VACCINES ARE DANGEROUS
- Vaccines do nothing
- Validation Diagrams – Police in Australia
- Vanuatu calls for action from UN on West Papua situation
- Vatican
- Vatican – CIA heart attack gun
- Vatican and the Knights of Malta
- Vatican Bank is the main shareholder in ‘Pietro Beretta’ arms
- Vatican Bank Organized Crime
- Vatican controls the CIA
- Vatican crimes
- Vatican criminal Jews
- Vatican is Practicing Child Sacrifice
- Vatican Jewish World Order exposed
- Vatican Jews are the main shareholder in ‘Pietro Beretta’ arms
- Vatican Prepares for Alien UFO Disclosure
- Vatican Secrets EXPOSED! Jordan Maxwell
- Vatican World Bank Whistleblower ***Exposes All***
- Vatican: Owner of world's biggest banks and top companies [Catholic Church Exposed]
- Vet News
- veteran employment
- veteran news
- Veterans Today
- Veterans Today disinformation Site
- victim of flu vaccine debacle receive payout from WA Government
- Victorian intensive care paramedics left accident victim to die
- Vietnam War fighting for opium
- Virginia TV Crew Fake Shooting – Gun Control Plot Confirmed
- Virologist Blows The Whistle On Hoax Pandemic
- Vitality4life BioChef Dehydrator
- Vitamin B17 kills cancer cells
- vitamin C supplements can prevent cancer
- Vitamin D Proven More Effective Than Both Anti-Viral Drugs and Vaccines At Preventing The Flu
- Vladimir Putin Vows to Defend Christianity Worldwide against the Jew World Order
- Vladimir Putin's Jewish blood
- Volvo power
- vote
- voter
- voters
- voting
- Voting fraud
- Wagners Pty Ltd
- wahhabi
- Wake up america
- Walid Shoebat CIA jewish disinfo website
- Walid Shoebat Former CIA Agent of the Muslim Brotherhood
- Wall Street Banks Secretly Build The World’s Largest Private Army
- Wall Street Jews financed Nazis 1920s+30s & Communist Russian Revolution 1917
- Wall Street Journal
- Walmart animal cruelty
- Walt Disney greatest deceptions of all time
- Want To Know How Vaccines Work? You Are In For A Surprise!
- War crimes and Westfield shopping
- War in Gaza = War Over Natural Gas
- WAR IS A RACKET by General Smedley Butler
- War is good for business
- War on Drugs is bogus
- WAR ON EUROPE! Jews Importing Millions Of 3rd World Migrants For The Final Genocide Of The White Race
- War on Terror is a war on civilians
- wariscrime
- warmakings
- wars
- Wars of Deception by the Jews
- WarZone
- Was Chile colonized by the ancient Greeks
- washington d.c.
- Washington Post
- WE ARE UNDER OCCULT ATTACK
- Wear A Mask Or Go To Jail During The 1918 Influenza Pandemic In California.
- Weather Manipulation Patents
- Weather Modification and Commodities Trading
- Web Of Trust – WOT not safe to use
- Web Of Trust are in the business of selling security seals for websites
- Web Of Trust criminals
- Web of trust internet scams
- Web of Trust mywot.com
- Web Of Trust scams
- Web of Trust Sued over Community Warnings
- Web of Trust WOT mywot Scam
- Web of Trust WOT scams
- Web Sheriff criminal Jews
- Web Sheriff Jews protecting their own
- Welcome to the Jew World Order
- Wesley Clark
- Western Australia
- Western Australia Police Force corruption
- Westfield Group Corruption
- Westfield group development
- Westfield Group israel link
- Westfield Group tax rorts
- Westfield in Greece's financial crisis
- Westfield Parramatta and the ALP
- Westfield Shopping Centre the israeli connection
- Westfields Parramatta corruption
- Westpac Banks scams
- What Ancient Greek Music Sounded Like
- What did Palestine look like in 1896 before Hitler created israel to nationalize the fake jews
- What do the Rothschilds and Schwab have in common?
- What does the name Israel mean?
- What got President John F. Kennedy murdered?
- What Happened To The 12 Tribes Of Israel
- What is called Italy was Great Greece
- what is in Coca Cola – coke
- What is Loxism?
- What Is Public Law 102-14
- What is The OPPT
- What is the true meaning of Zionism
- What is the true origins of Zionism
- What is the value of GREECE
- What Israels American bombs do to children
- What Masonic Clubs – Freemasons believe in
- What The Jews Did To Germany
- What the Jews did to the Germans
- What the Polish Jews did to the Germans
- What the Price of Gold Is Telling Us
- What To Do When Confronted by Police
- What Turkish Cuisine?
- What World-famous Men have said About the Jews
- What's in Your Flu Shot!
- whats in milk
- WhatsApp’s website hacked briefly by Jews posing as pro-Palestine protestors
- When False Flags dont Fly anymore PEOPLE ARE LEARNING THE TRUTH
- When Jews were kings (and opium lords) in Shanghai
- When you hack the Jewish Governments
- Where do Jews come from
- Whirlpool Broadband Forums
- WHISTLEBLOWER DR. ANDREAS NOACK renown Austrian chemist is dead just hours after speaking out found dead about the effects of the adjuvant Graphene oxide.
- Whistler detectable radar detectors
- Whistler radar detectors detectable
- Whistler Radar Detectors unsafe
- white fake jews
- white house
- White House blocking release of Monsanto-linked lobbyist’s email
- White House refuses to reveal ties with Monsanto
- WhiteHouse camera! action!
- Who created Wahhabism and the state of Jewish Saudi Arabia
- who funded Hitler
- Who Funded The Nazis? Adolph Rothschild
- who Hamas is working for.. yes you got it… israel.
- Who Is Esau-Edom
- Who is ISIS ? – Really
- Who is really behind Gun Control
- who promotes Zionist Unicef? Angelina Jolie
- Who runs the worlds Organized Crime
- Who said RSPCA was not a business?
- Why are Jew so smart?
- Why are the criminal Jews so hated
- Why Can't Americans See the Obvious Truth?
- Why Does George W. Bush Fly in Drug Smuggler Barry Seal’s Airplane?
- WHY DON'T 'ISLAMIC TERRORISTS' EVER ATTACK POLITICIANS?
- Why Is Supposedly Dead Sandy Hook Principal Seen at Boston Bombing Event?
- Why Jews Push Gay Marriage
- Why Marijuana Weed Pot is illegal
- Why most people may not wake up – The Sad Truth
- Why So Many Israeli Actors Playing Arabs?
- Why the Jews Are Hated
- why the jews are so hated
- Why the jews pose as muslim terrorists
- Why the Jews sacrifice babies and eat Gentile blood
- Why the super-rich get richer — and you don’t
- Why Vatican Rothschild Is Trying To Destroy The Dollar For Gold: Rothschild’s Handbook
- Wife
- Wikileaks
- Wikileaks Is A Rothschild Operation: Rothschilds Use Wikileaks To Wound Rival Bank. Julian Assange’s Bail Posted By Rothschilds’ Sister-in-law
- WIKILEAKS WORKING FOR ISRAEL
- Wikipedia is a blackmail extortion racket run by the Jews
- Will Holden get more bailouts from Australian Government
- William Greer
- Wind Farms Wind Power is not the answer
- Wingecarribee Council Corruption: worst council in NSW
- Wingecarribee Shire Councillors
- Winston Churchill
- WIRES Bowral – Rachel
- WIRES pathetic
- With the lie about bird flu
- Wolf Reintroduction Benefits Ecosystem
- Wollongong Mayor Tony Bevan ran child sex ring
- woman takes Flu vaccine now she cant walk forward
- Woman who MADE UP entire bestselling holocaust memoir is forced to pay back $22.5 million after her lies are revealed 17 years later … and she’s not even Jewish
- Woolworths bakery eew!
- Woolworths croissant medium 8pk taste like cardboard
- Woolworths not the fresh food people
- Work
- World Bank Whistleblower Karen Hudes Reveals How The Global Elite Jews Rule The World
- World Jewish Congress admits they’re behind every culturally ill that plagues society.
- World News
- World Order
- World Politics
- World truth
- world war
- World War 1 & World War 2 – the Jew wars
- World War 1 and the real truth
- World War II Never Ended for Germany – It remains occupied to this day
- World Zionism hijacking United Nations to wage wars
- World's biggest bank: Vatican Bank
- Worst Australian Police brutality Kings Cross
- WOT criminals
- WOT loses in court
- WOT mywot faces jail time
- WOT mywot is useless for internet security
- WOT mywot.com – G7W – David Raynard (Stadler) Ohio criminal
- WOT scams
- WW2 Holocoust was financed by Zionist Rothschild
- WW2 Jewish leaders
- WW2: Raping & Killing White Women & Children: Murder of German & Finnish innocents – 2 million women raped
- www.adelaidecartridge.com www.inkjetcity.com.au scams
- www.radars.com.au exposed
- XM.COM (ex-XEMarkets) — Forex Broker
- Yeshiva Rabbi School
- Yet another Jewish international organ trafficking ring exposed
- Yids rape kids
- Young woman burned alive in front children and police officers after being labeled a witch
- YOUR BIRTH CERTIFICATE IS A STOCK ON THE NYSE!
- Your Bottled Water Has 24500 Chemicals
- Your Garlic is Being Imported From China and it’s Filled with Bleach and Toxic Chemicals (Here’s How to Spot It!)
- Your Soul Is Owned By The Vatican
- Your tax money is used to traffic children
- youropinion.com.au just a scam
- Youtube banned Brother Nathaniel channel
- YouTube banning your videos – try TruTube
- Youtube censorship by Governments
- YouTube Policy on Hate Speech
- Youtube suppressing the truth by deleting videos and accounts
- YouTube suspends Prime Minister Tony Abbott's YouTube account
- Zapper by Don Croft…Sweet Orgone Energy for health
- Zbigniew brzezinski
- Zenithink ZT 280 C91 cheap and nasty
- Zionification of Islam
- Zionism and How They Control Us.
- Zionism and Judaism by Rabbi Yisroel Dovid Weiss
- Zionism and the Third Reich
- Zionist Apple Jews
- Zionist Avril Lavigne showing whom she serves
- Zionist Bankers & Media Control
- ZIONIST BANKERS WHO RUN THE WORLD
- Zionist Bono exposed as a complete fraud
- Zionist Council of Victoria
- Zionist Dalai Lama
- Zionist Dick Smith the disinformation King
- Zionist Elite Sports Industry promote drug doping
- Zionist Federation of Australia
- Zionist Government scams
- Zionist Hitler and his boss Rothchild
- Zionist Jews Caught Faking Al Qaeda ( Al CIA-da )
- Zionist Jews Communist Goals (1963)
- Zionist Jews loved to scalp and collect heads too
- Zionist Joe Ludwig loves animal cruelty
- Zionist Jon Faine of Radio 774 ABC Melbourne defending israel again
- Zionist mark zuckerberg lie
- Zionist Meat Industry is so cruel
- Zionist Mockery of Police And Military
- Zionist News
- Zionist Psychotronic Weapons
- Zionist Richard Pratt
- Zionist Saudi Royal Family Completely Exposed Must Watch
- Zionist trying to start World War III.
- Zionist war on Mali African Gold
- Zionists Behind Armenian Genocide Holocaust
- Zionists Control the Internet!
- Zionists Infiltrate The Tea Party
- Zionists to boost thought crime law
- Zionists tool of multiculturalism to demolish western civilization
- Zoosk Online Dating STOP!!! Dont be tricked into subscribing!!!
Copyright 2009 © Jew World Order - The Anti-Christ – Satan's Chosen People
Powered by WordPress | Designed by: Premium WordPress Themes | Thanks to Themes Gallery, Bromoney and Wordpress Themes